Computer-Science
Process
- interrupt, process, file, memory, I/O
- process definition
- Multiprogramming, Timesharing
- process descriptor, process queue, run queue
- pid, process state, time slice, mm, eip
task_struct{},thread_union{}, KMS(Kernel Mode Stack)init_task,current- process schedule example
- How processes are created and destroyed
fork,exec,exit,waitfork: duplicate the parentexec: transform the current process into anotherexit: stop the current processwait: wait until the child dies- All processes in Linux is created through
forkandexec
- process vs thread
pthread_createkernel_thread- shell
- Linux initialization
- Where is CPU
1. What is a process
A process is a program loaded in the memory.
2. History of OS
- 1945 ~ 1955 :
- No OS.
- 1955 ~ 1965 :
- FMS (Fortran Monitoring System). Runs a set of programs one by one.
- cpu utilization problem: over 90% time the cpu was idle
- 1965 ~ :
- Multiprogramming. Load several programs at once. Run one by one. If the current one is blocked because of I/O, go to the next process. Fairness problem: cpu-bound program is favored.
- Now :
- Time Sharing. Allocate x ticks to each process. Now all processes will be stopped either if it executes an I/O instruction or the timer expires.
3. Data structures for process
- process descriptor:
- one for each process.
- contains information about the corresponding process such as process ID, ticks
- remained, register values of the last stop-point, memory location, size, etc.
task_struct{}is the process descriptor in Linux. (include/linux/sched.h)- “current” points to the current process
thread_union{}=task_struct{}+ Kernel Mode Stackinit_taskis the kernel’s process descriptor (arch/x86/kernel/init_task.c,include/linux/init_task.h)struct task_struct init_task = INIT_TASK(init_task); INIT_TASK(init_task) = { ........ .parent = &init_task, .comm = "swapper", ........ }
- process queue:
- linked list of process descriptors
&init_taskis the start of this queue.- traversing the process queue
void display_processes(){ struct task_struct *temp; temp = &init_task; for(;;){ print process id, user id, program name, process state for temp; temp = next_task(temp); // find next process if (temp == &init_task) break; } printk("\n"); }
- run queue
- A linked list of runnable processes.
- The scheduler looks at this queue to pick the next process after each interrupt
- Each cpu has its own run queue
- Each run queue is an array of queues based on the priority
- :
struct prio_array{}.queue[]
- :
Exercise-1
3.1) task_struct is defined in include/linux/sched.h (search for “task_struct {”).
Which fields of the task_struct contain information for process ID, parent process ID, user ID, process status, children processes, the memory location of the process, the files opened, the priority of the process, program name?
- Process ID :
pid_t pid - Parent process ID :
struct task_struct parent;/* parent process */
- User ID :
uid_t uid - Process status :
volatile long state;/* -1 unrunnable, 0 runnable, >0 stopped */
- Children processes :
struct list_head children;/* list of my children */
- The memory location of the process :
struct mm_struct *mm - The files opened :
struct files_struct *files;/* open file information */
- The priority of the process :
int orio, static prio, normal prio; - Program name :
char comm[TASK_COMM_LEN]
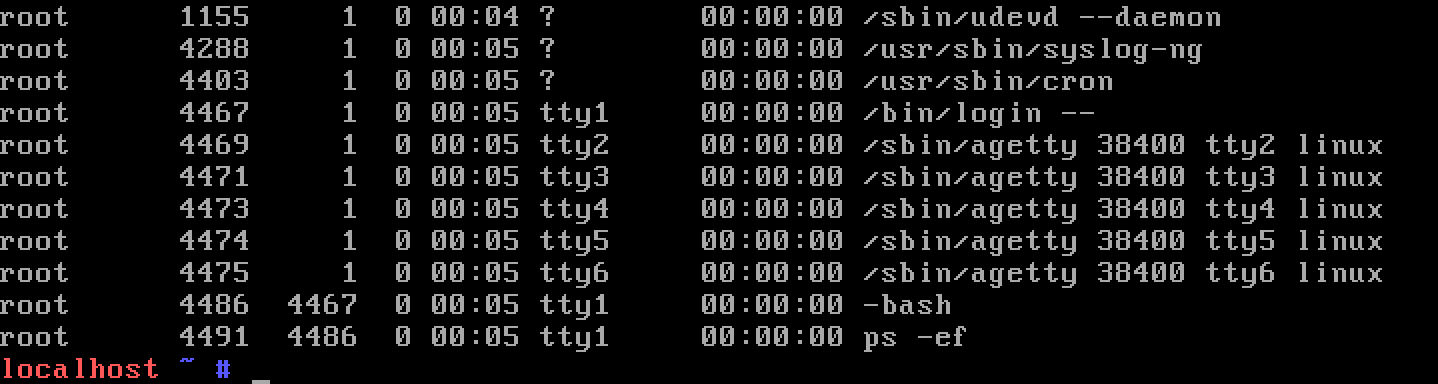
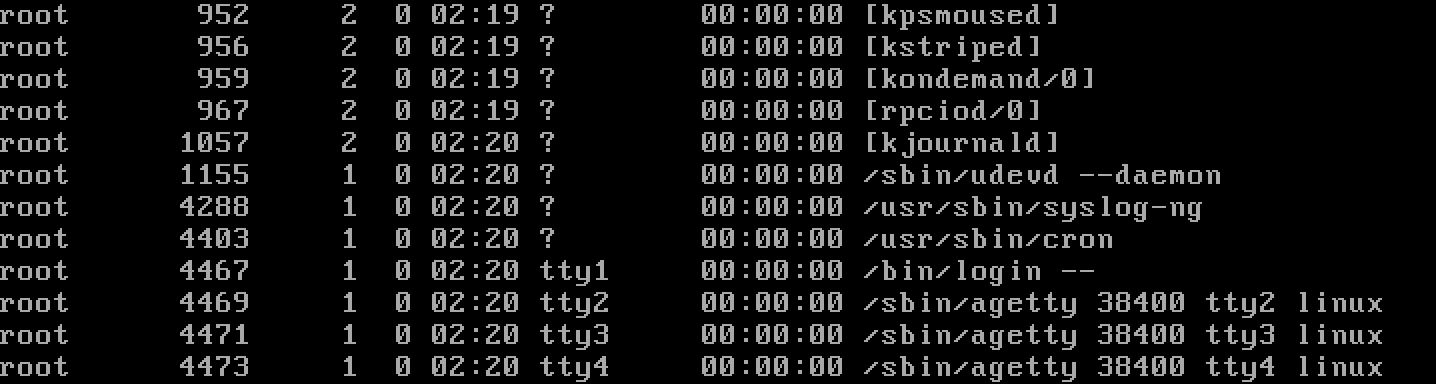
3.2) Display all processes with ps –ef. Find the pid of ps -ef, the process you have just executed. Find the pid and program name of the parent process of it, then the parent of this parent, and so on, until you see the init_task whose process ID is 0.
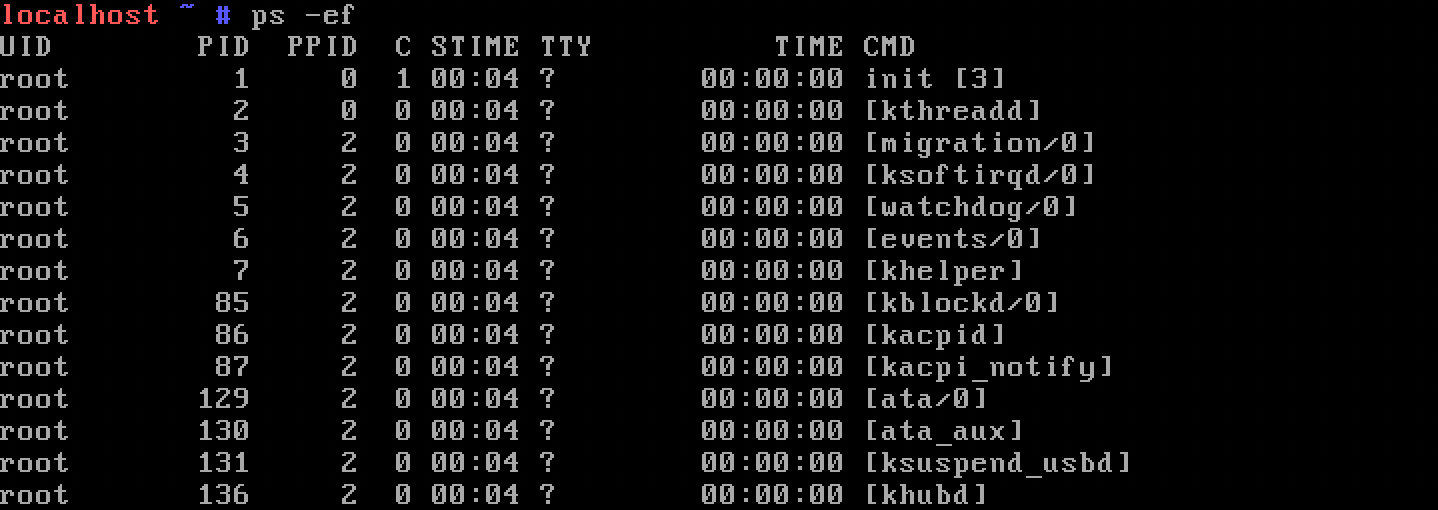
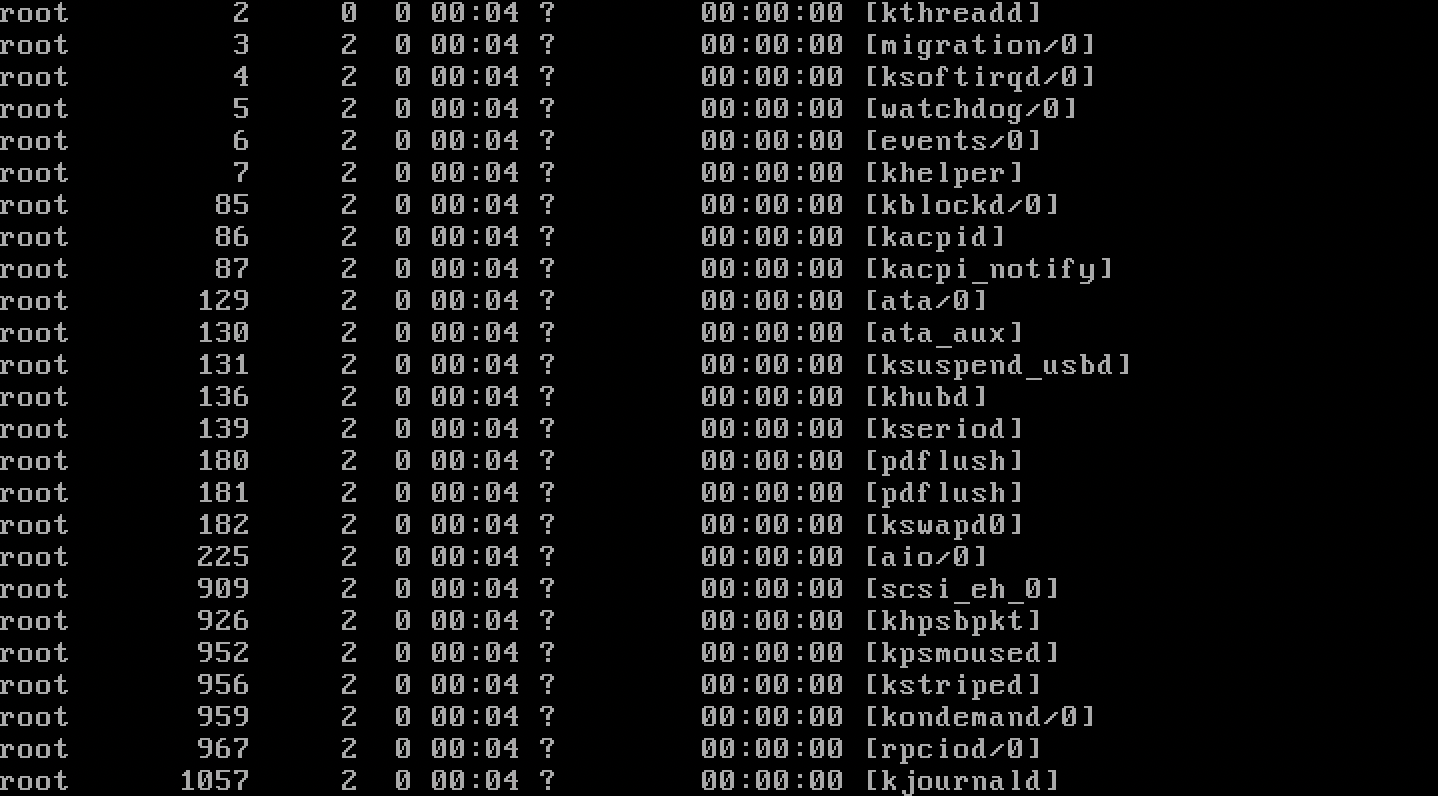
$ ps -ef
UID PID PPID C STIME TTY TIME CMD
root 1 0 1 00:04 ? 00:00:00 init [3]
... ... ... ... ... ... ... ...
root 4467 1 0 00:05 tty1 00:00:00 /bin/login --
... ... ... ... ... ... ... ...
root 4486 4467 0 00:05 tty1 00:00:00 -bash
root 4491 4486 0 00:05 tty1 00:00:00 ps -ef
ps -ef의 PID는 4491이다.ps -ef의 PPID는 4486이므로, parent process는 PID가 4486인-bash이다.-bash의 PPID는 4467이므로, parent process는 PID가 1인init [3]이다.init [3]의 PPID는 0으로, parent process는 PID가 0인init_task이다.
3.3) Define display_processes() in init/main.c (right before the first function definition). Call this function in the beginning of start_kernel().
Confirm that there is only one process in the beginning. Find the location where the number of processes becomes 2. Find the location where the number of processes becomes 3. Find the location where the number of processes is the greatest. Use dmesg to see the result of display_processes().
init/main.c :
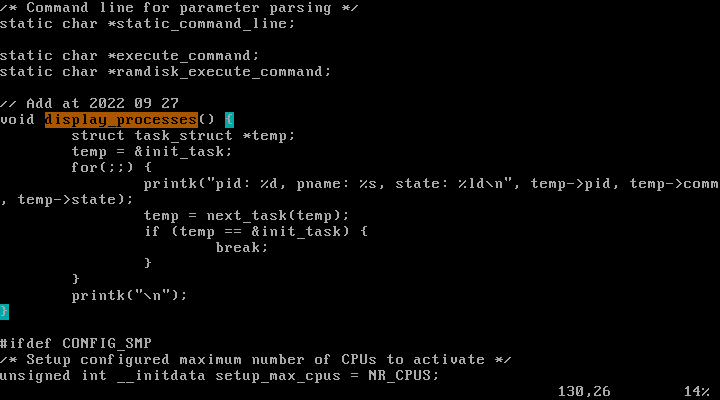
init/main.c에display_processes()를 정의하였다. 코드가 의미하는 바는 다음과 같다.
- 포인터형
struct인temp를 선언하고,init_task(커널의 process descriptor) 을 넣어준다. - 해당하는 프로세스마다 각각 pid, pname, state를 출력하고,
temp는 그 다음 프로세스를 지정하도록 한다. init_task다음에도init_task라면 for문을 탈출하고 함수가 끝나게 된다.
- 포인터형
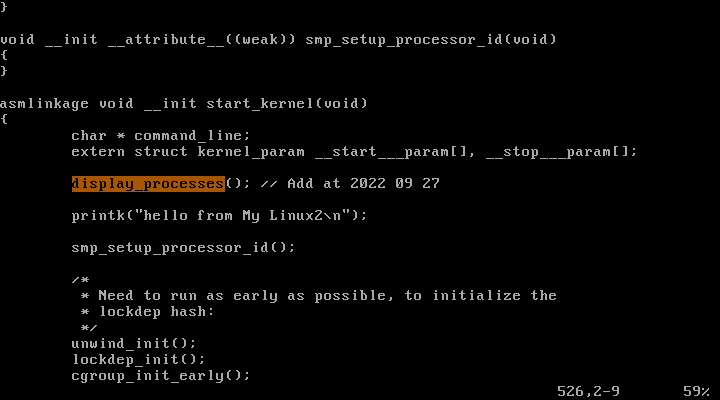
start_kernel 함수가 호출되면 display_processes()를 가장 먼저 호출할 수 있게 하였다.
변경사항을 적용하기 위해 커널을 컴파일하고, 재부팅하였다.
$ make bzImage
$ cp arch/x86/boot/bzImage /boot/bzImage
$ reboot
dmesg로 부팅 메세지를 확인해보았다.
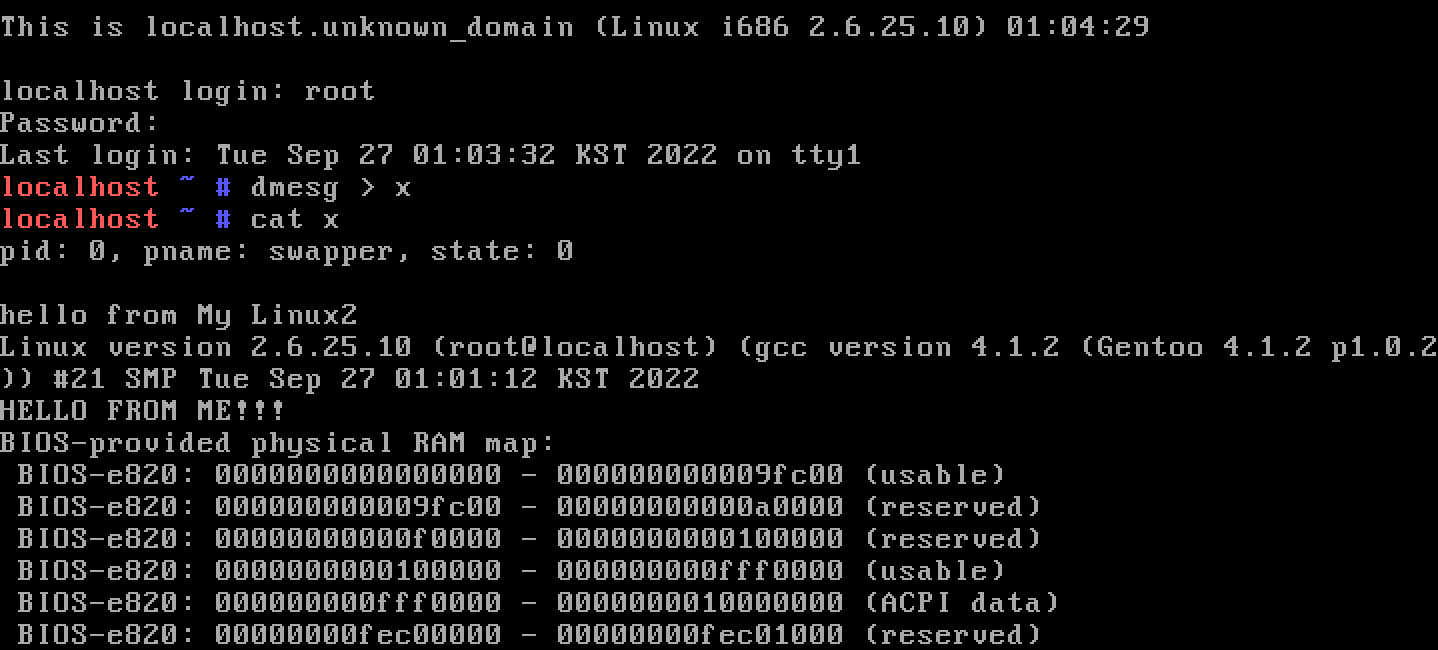
pid: 0, pname: swapper, state: 0
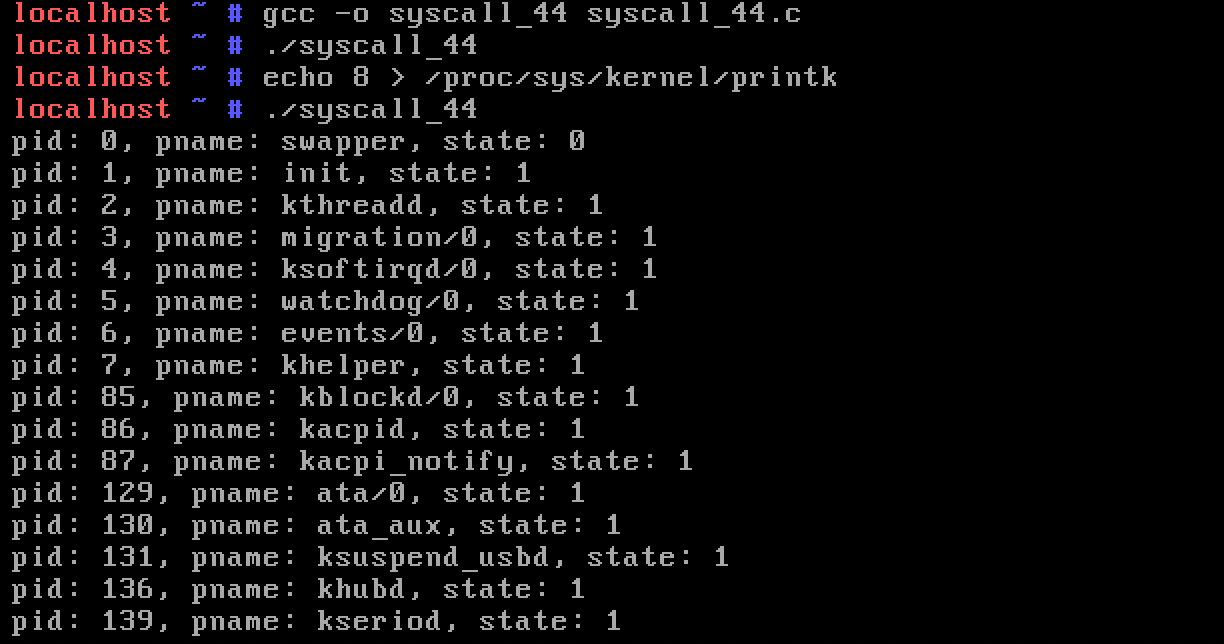
실행 결과 하나의 프로세스만 있었고, swapper 프로세스가 ‘pid: 0’으로 생성된 것을 볼 수 있었다.
실행 중인 프로세스가 2개가 된 첫 번째 시점은 kernel_init의 최상단에서 display_processes를 호출했을 때이다.
가장 많은 프로세스가 보여지는 곳은 kernel_init에서 init_post가 호출된 이후이다.
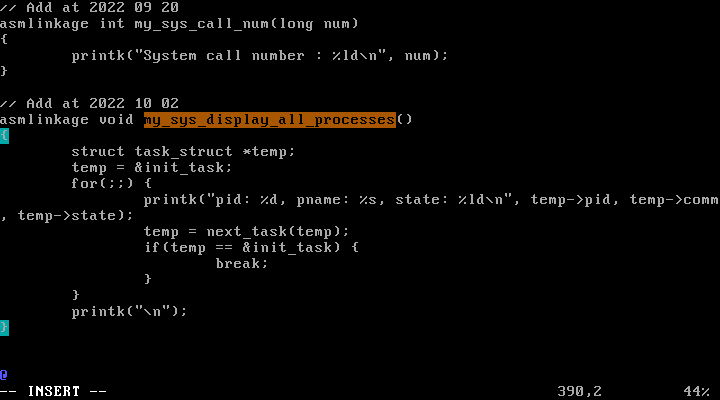
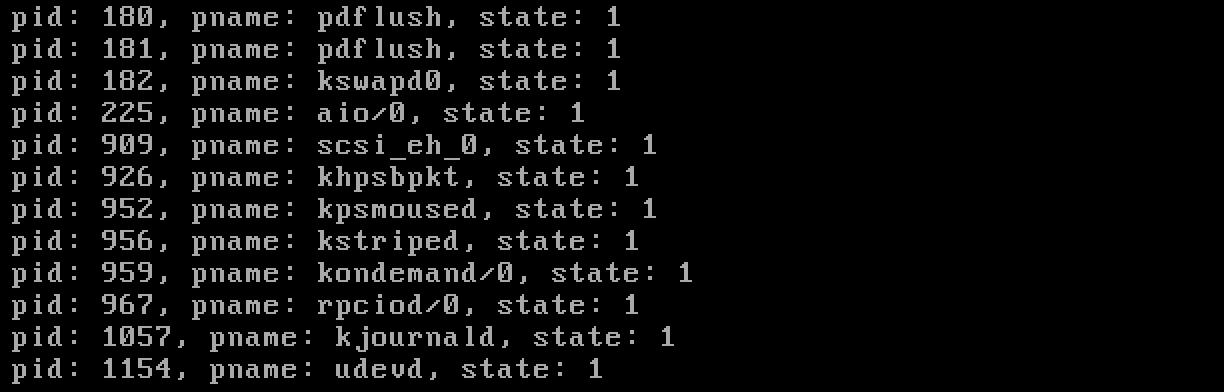
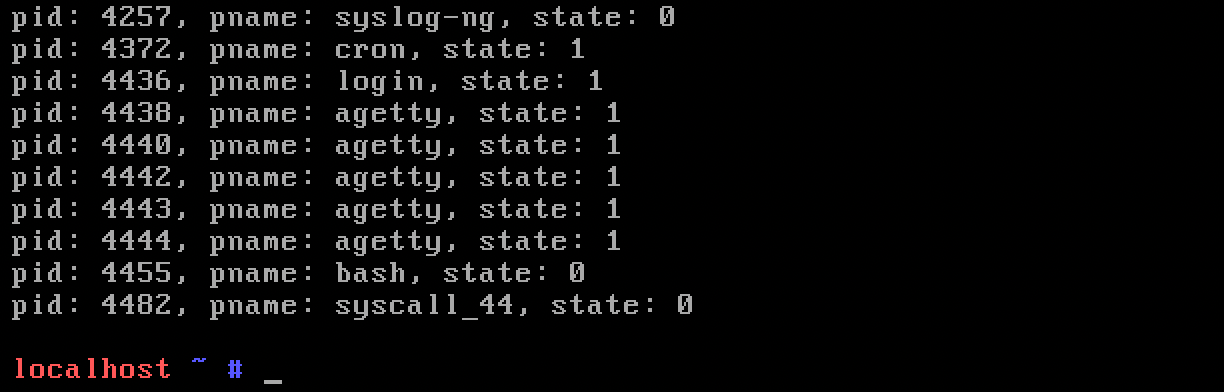
3.4) Make a system call that, when called, displays all processes in the system. Run an application program that calls this system call and see if this program displays all processes in the system.
프로세스 정보를 출력하는 system call을 만드는 것이므로 fs/read_write.c에 함수를 추가한다.
fs/read_write.c :
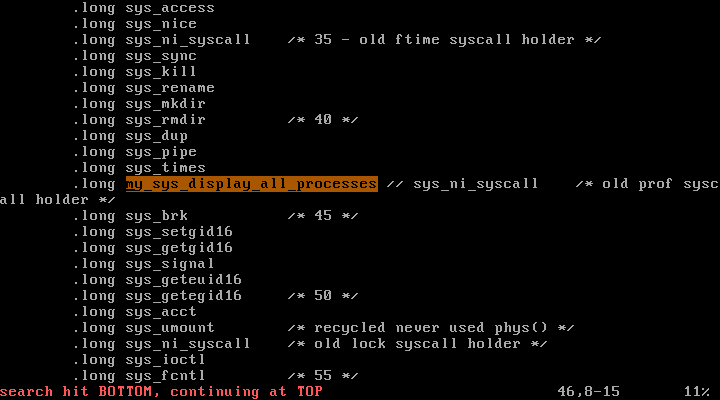
이후 arch/x86/kernel/syscall_table_32.S 에서 비어있는 44번 index에 해당 함수를 설정해주었다.
arch/x86/kernel/syscall_table_32.S :
이후, 변경사항을 적용하기 위해 make 명령어로 리눅스 커널을 컴파일하고 재부팅하였다.
$ make bzImage
$ cp arch/x86/boot/bzImage /boot/bzImage
$ reboot
재부팅 후, 만든 시스템 콜 함수를 호출하는 프로그램을 작성하였다.
syscall_44.c :
#include <unistd.h>
int main(void) {
syscall(44);
return 0;
}
로그 레벨을 바꾸고 프로그램을 실행해 시스템 콜 함수를 호출하면 프로세스 목록이 보여진다.
$ echo 8 > /proc/sys/kernel/printk
$ ./syscall_44
3.4.1) Make a system call that, when called, displays all ancestor processes of the calling process in the system. For example, if ex1 calls this system call, you should see: ex1, ex1’s parent, ex1’s parent’s parent, etc. until you reach pid=0 which is Linux itself.
모든 부모의 프로세스 정보를 출력하는 system call을 만드는 것이므로 fs/read_write.c에 함수를 추가한다.
fs/read_write.c :
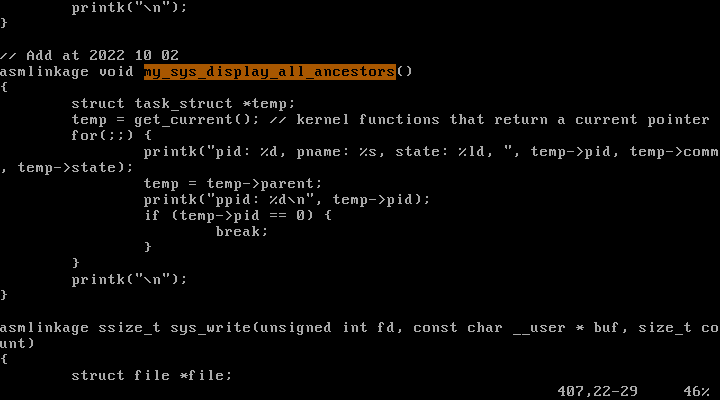
my_sys_display_all_ancestors 함수에서는, 현재 process의 정보를 얻기 위해, current 포인터를 반환해주는 커널 함수인 get_current를 사용하였다.
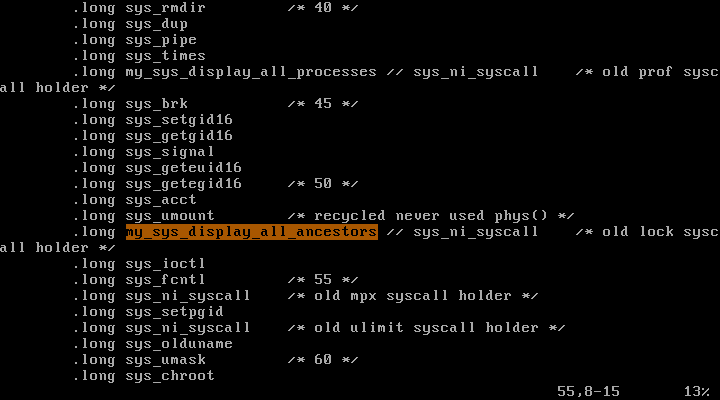
이후 arch/x86/kernel/syscall_table_32.S 에서 비어있는 53번 index에 해당 함수를 설정해주었다.
arch/x86/kernel/syscall_table_32.S :
이후, 변경사항을 적용하기 위해 make 명령어로 리눅스 커널을 컴파일하고 재부팅한 하였다.
$ make bzImage
$ cp arch/x86/boot/bzImage /boot/bzImage
$ reboot
재부팅 후, 만든 시스템 콜 함수를 호출하는 프로그램을 작성하였다.
syscall_53.c :
#include <unistd.h>
int main(void) {
syscall(53);
return 0;
}
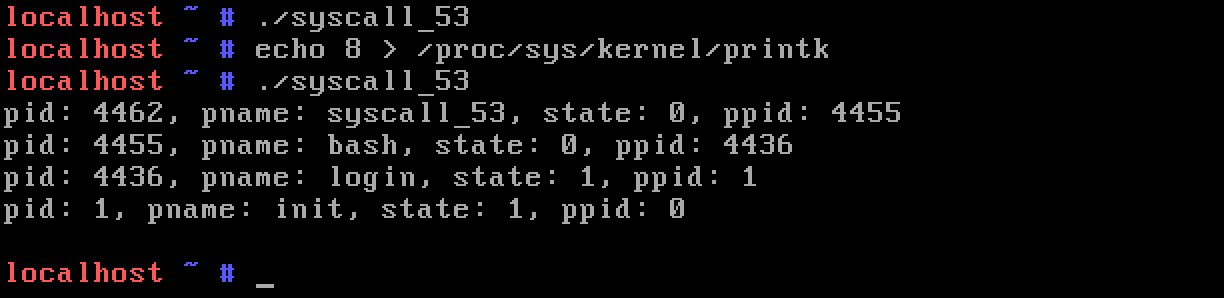
로그 레벨을 바꾸고 프로그램을 실행해 시스템 콜 함수를 호출하면 현재 프로세스와 조상들의 프로세스 목록이 보여진다.
$ echo 8 > /proc/sys/kernel/printk
$ ./syscall_53
3.5) Run three user programs, f1, f2, and f3, and run another program that calls the above system call as follows.
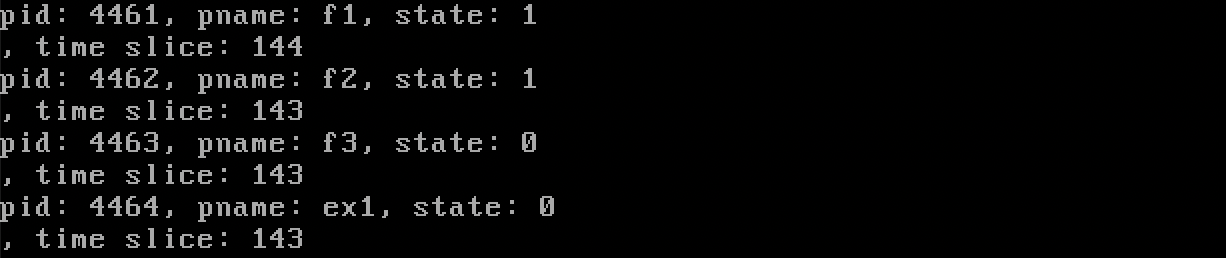
State 0 means runnable and 1 means blocked. Observe the state changes in f1, f2, f3 and explain what these changes mean.
f1.c :
int i,j; double x=1.2;
for(i=0;i<100;i++){
for(j=0;j<10000000;j++){ // make f1 busy for a while
x=x*x;
}
// and then sleep 1sec
usleep(1000000);
}
f2.c :
int i,j; double x=1.2;
for(i=0;i<100;i++){
for(j=0;j<10000000;j++){ // make f2 busy for a while
x=x*x;
}
// and then sleep 2sec
usleep(2000000);
}
f3.c :
int i,j; double x=1.2;
for(i=0;i<100;i++){
for(j=0;j<10000000;j++){ // make f3 busy for a while
x=x*x;
}
// and then sleep 3sec
usleep(3000000);
}
ex1.c :
for(i=0;i<100;i++){
sleep(5);
syscall(17); // show all processes
// assuming the system call number in exercise (3.4) is 44
}
$ echo 8 > /proc/sys/kernel/printk
$ ./f1&
$ ./f2&
$ ./f3&
$ ./ex1
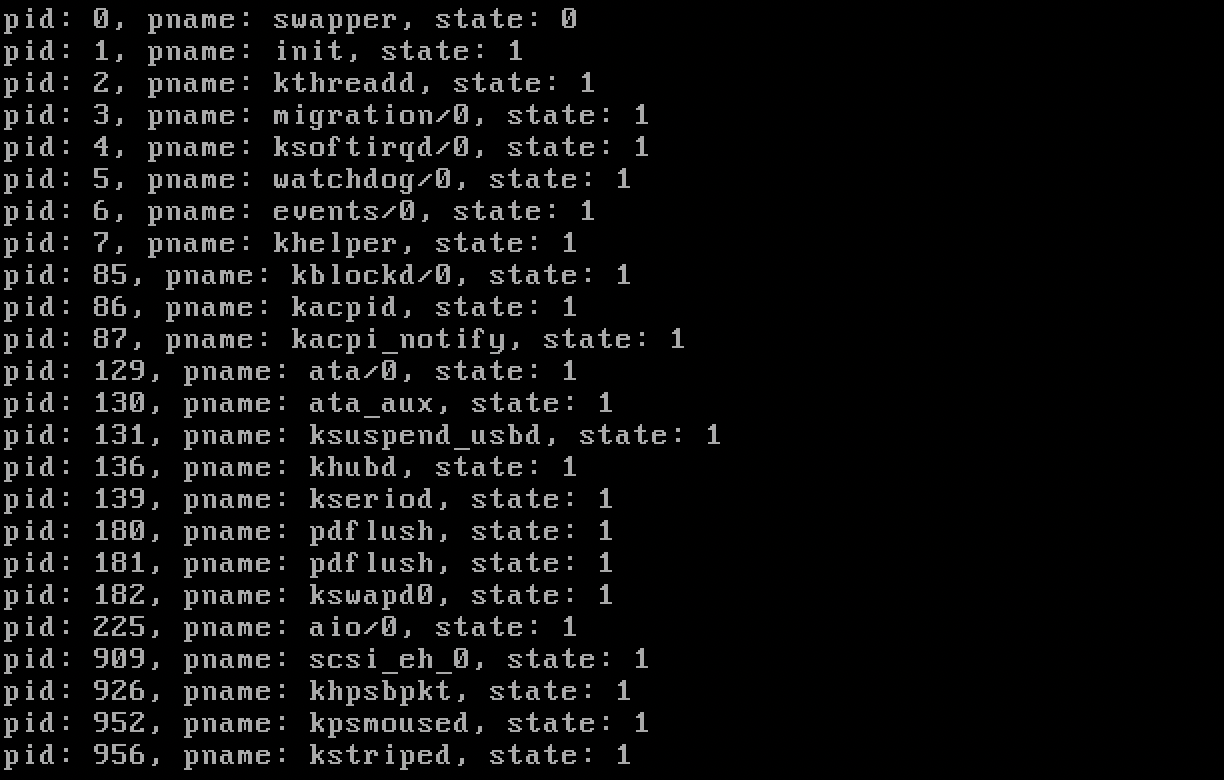
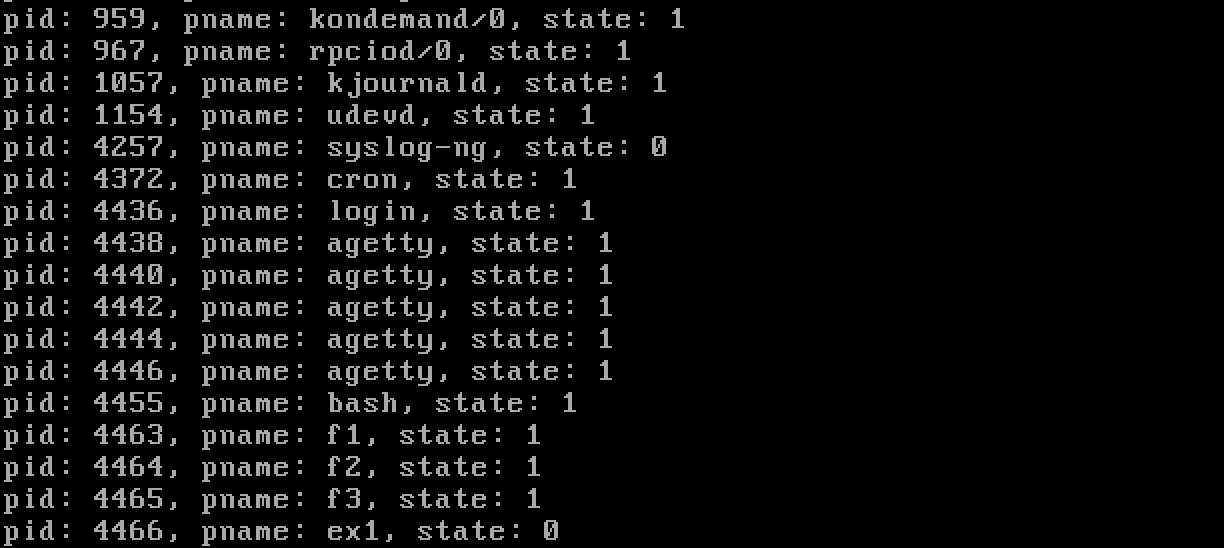








실행 결과, f1, f2, f3의 상태가 바뀌는 것을 확인할 수 있었다. ex1의 state는 0으로 유지되었다.


f1 > f2 > f3 > ex1 순으로 종료되었다.
3.6) Modify your my_sys_display_all_processes() so that it can also display the remaining time slice of each process (current->rt.time_slice) and repeat 3.5) as below to see the effect.
chrt -rr 30 ./f1 will run f1 with priority value = max_priority-30 (lower priority means higher priority).
-rr is to set scheduling policy to SCHED_RR (whose max_priority is 99).
init/main.c :
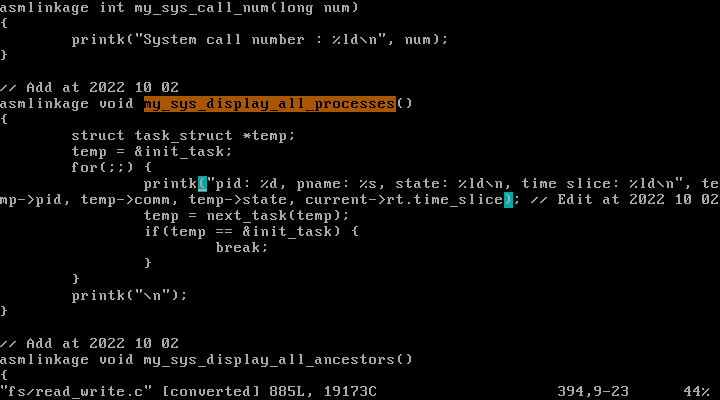
display_processes 함수의 printk에 current->rt.time_slice를 추가해주고,
변경사항을 적용하기 위해 커널을 컴파일하고, 재부팅하였다.
$ make bzImage
$ cp arch/x86/boot/bzImage /boot/bzImage
$ reboot
chrt는 프로세스의 real-time 속성을 수정하는 명령어로, -rr은 스케줄링 정책을 SCHED_RR으로 설정하는 것을 의미한다.
이때, 프로세스는 낮은 숫자를 가질수록 높은 우선순위를 가진다.
$ chrt –rr 30 ./f1&
$ chrt -rr 30 ./f2&
$ chrt -rr 30 ./f3&
$ chrt -rr 30 ./ex1
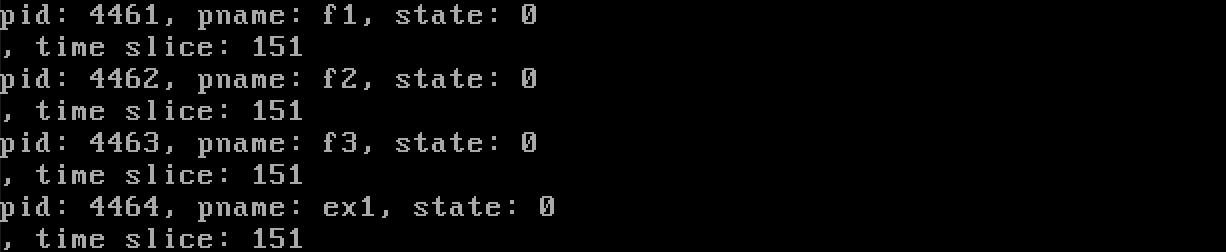
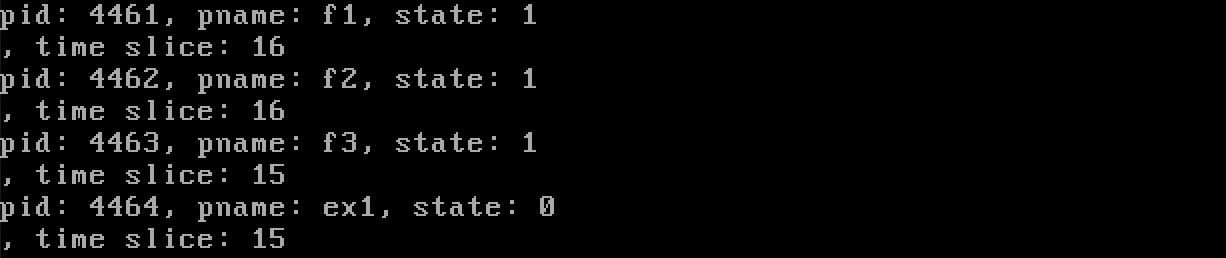
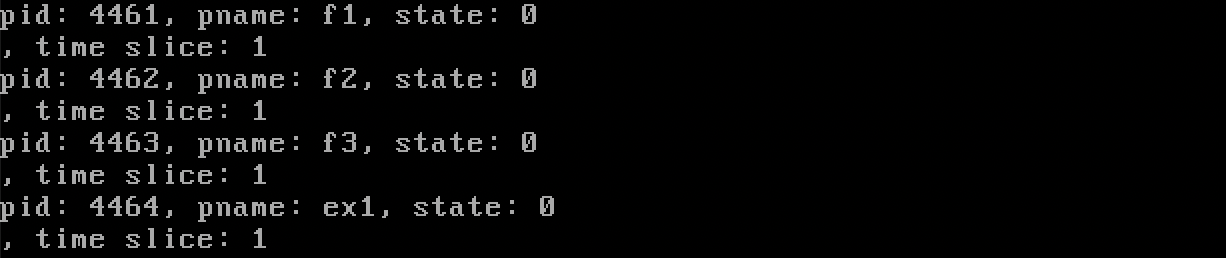
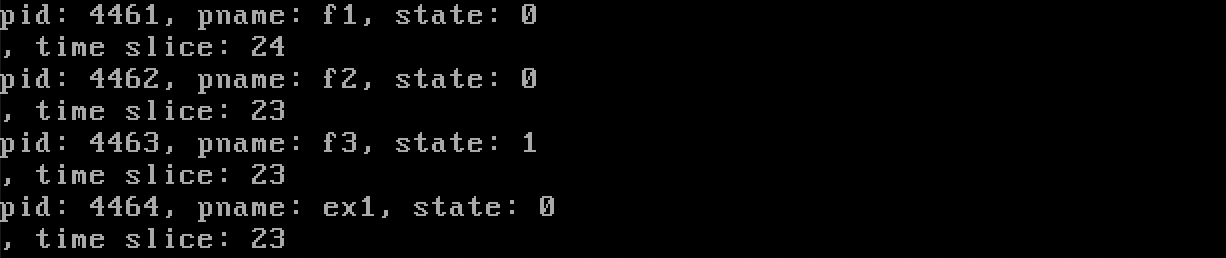
실행 결과 각 프로세스가 실행될 때의 잔여 타임 슬라이스를 보여준다.
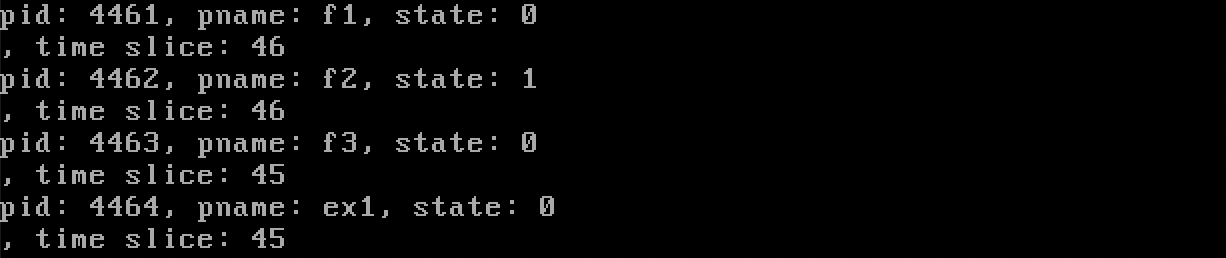
초 단위로 추측되며 6~9개의 프로세스가 같은 값을 가지는 것으로 보아 굉장히 짧은 시간에 여러 프로세스들이 처리되는 것을 알 수 있다.
처음에는 250 정도가 주어지고 0에 도달하면 25 정도가 새로 채워졌다. 이 과정이 ex1이 끝날 때까지 반복되었다.
4. Kernel code for process data structures and the scheduler
include/linux/sched.h :
struct task_struct {
long state; // 0: runnable, >0 : stopped or dead
int prio; // priority
const struct sched_class *sched_class; // scheduling functions depending on
// scheduling class of this process
struct sched_entity se; // scheduling info
struct list_head tasks; // points to next task
struct mm_struct *mm; // memory occupied by this process
pid_t pid;
struct task_struct *parent;
struct list_head children;
uid_t uid; // owner of this process
char comm[TASK_COMM_LEN]; // program name
struct thread_struct thread; // pointer to saved registers
struct fs_struct *fs;
struct files_struct *files;
struct signal_struct *signal;
struct sighand_struct *sighand;
}
struct sched_class { // fair class has func name such as task_tick_fair, enqueue_task_fair..
// rt class has task_tick_rt, enqueue_task_rt, ...
void (*enqueue_task)(struct rq *rq, struct task_struct *p, ...);
void (*dequeue_task)(struct rq *rq, struct task_struct *p, ...);
struct task_struct *(*pick_next_task)(struct rq *rq);
void (*task_tick)(struct rq *rq, struct task_struct *p,...);
.........
}
struct sched_entity {
u64 sum_exec_runtime;
u64 vruntime; // actual runtime normalized(weighted) by the number of
// runnable processes. unit is nanosecond
................
}
struct list_head is little tricky. It does not point to the next item directly.
For example,
struct list_head tasks;
does not mean (current->tasks).next points to the next task.
include/linux/list.h :
struct list_head{
struct list_head *next, *prev;
};
(current->tasks).nextsimply points to another structlist_headthat is included in the next process. To find the next process, use macro:list_entry()ornext_tasks()list_entry( (current->tasks).next, struct task_struct, tasks)- or
next_task(current)
We can display all processes in the system by
struct task_struct *temp;
temp = &init_task;
for(;;) {
printk("pid %d ",temp->pid);
temp = list_entry(temp->tasks.next, struct task_struct, tasks);
if (temp == &init_task) break;
}
To display run queues, it is more difficult.
Each process has a priority (“prio” field in task_struct), and there are 0 to 139 priorities.
For each priority we have different run queue.
run_list points to the next process in the run queue with the priority of the corresponding process.
this_rq() will point to the “struct rq” structure for the current cpu. This structure contains 140 run queues.
kernel/sched.c :
union thread_union{
struct thread_info thread_info;
unsigned long stack[THREAD_SIZE/sizeof(long)]; // 8192 bytes
}
#define next_task(p) list_entry(rcu_dereference((p)->tasks.next), struct task_struct, tasks)
#define for_each_process(p) for(p=&init_task;(p=next_task(p))!=&init_task;) do
arch/i386/kernel/init_task.c :
union thread_union init_thread_union;
struct task_struct init_task = INIT_TASK(init_task);
include/asm-i386/thread_info.h :
struct thread_info{
struct task_struct *task; // main task structre
struct exec_domain *exec_domain; // execution domain
long flags;
long status;
__u32 cpu; // cpu for this thread
mm_segment_t addr_limit; // 0-0xBFFFFFFF (3G bytes) for user-thread
// 0-0xFFFFFFFF (4G bytes) for kernel-thread
}
kernel/sched.c :
#define DEF_TIMESLICE (100*HZ/1000) // 100 ms for default time slice. HZ=1000
// HZ is num of timer interrupts per second.
struct prio_array { // run queue
unsigned int nr_active;
struct list_head queue[MAX_PRIO]; // run queues for various priorities
};
void __activate_task(p, struct rq *rq) { // wake up p
struct prio_array * target = rq->active;
enqueue_task(p, target);
p->array = array;
}
process priority: each process has priority in “prio” (value 0..139) 0..99 is for real time task. 100..139 for user process
140 priority list
The kernel calls schedule() at the end of each ISR(Interrupt Service Routine) to pick the next process.
kernel/sched.c :
void schedule() {
struct task_struct *prev, *next;
struct prio_array *array;
prev = current;
rq = this_rq(); // run queue of the belonging cpu
array = rq->active; // active run queue
deactivate_task(prev, rq);
idx = sched_find_first_bit(array->bitmap);
queue = array->queue + idx;
/** old code
next = list_entry(queue->next, struct task_struct, run_list); // next task
array = next->array;
**/
next=pick_next_task(rq, prev);
rq->curr = next; // next is the curr task
context_switch(rq, prev,next); // move to next
}
struct task_struct * pick_next_task(..){
class=sched_class_highest;
p=class->pick_next_task(rq);
return p;
}
struct task_struct *pick_next_task_fair(rq){ // for cfs case
cfs_rq=&rq->cfs;
se=pick_next_entiry(cfs_rq);
p = task_of(se);
return p;
}
struct sched_entity *pick_next_entity(..){
rb_entry(.....); // find the next task in rb tree
}
#define this_rq() (&__get_cpu_var(runqueues))
static DEFINE_PER_CPU_SHARED_ALIGNED(struct rq, runqueues);
#define DEFINE_PER_CPU_SHARED_ALIGNED(type, name) \
__attribute__((__section__(“.data.percpu"))) __typeof__(type) per_cpu__##name
The above will make
static struct rq per_cpu_ruqueues;
void wake_up_new_task(struct task_struct *p, ..){
struct rq *rq, *this_rq;
int this_cpu, cpu;
rq = task_rq_lock(p, ...); // the runqueue of the cpu this task belongs to
cpu = task_cpu(p); // cpu p belongs to
__activate_task(p, rq); // insert p in rq
}
void scheduler_tick(){ // timer interrupt calls this to
// decrease time slice of current p (in old code)
// in new code (after 2.6.23), it increases curr->se->vruntime
int cpu=smp_processor_id();
struct rq *rq=cpu_rq(cpu);
struct task_struct *curr=rq->curr;
curr->sched_class->task_tick(rq, curr, 0); // task_running_tick() in old code
.......
}
/** old code
void task_running_tick(rq, p){
if (!--p->time_slice){ // decrease it. if 0, reschedule
dequeue_task(p, rq->active);
set_tsk_need_resched(p);
p->time_slice=task_timeslice(p); // reset time slice
enqueue_task(p, rq->active); // put back at the end
}
}
**/
void task_tick_fair(rq, curr, ..){
se=&curr->se; // sched_entity
cfs_rq=cfs_rq_of(se);
entity_tick(cfs_rq, se, ...);
}
void entity_tick(cfs_rq, ...){
update_curr(cfs_rq);
.........
}
void update_curr(cfs_rq){
struct sched_entity *curr=cfs_rq->curr;
now=rq_of(cfs_rq)->clock;
delta_exec=now - curr->exec_start; // running time so far for curr
__update_curr(cfs_rq, curr, delta_exec);
curr->exec_start = now;
}
void __update_curr(cfs_rq, struct sched_entity *curr, delta_exec){
curr->sum_exec_runtime += delta_exec;
delta_exec_weighted=calc_delta_fair(delta_exec, curr);
curr->vruntime += delta_exec_weighted;
}
5. fork
When the kernel starts, we have only one process: init_task, which represents the kernel itself. Other processes are created by fork.
1) fork system call duplicates a process.
example:
#include <sys/types.h>
#include <sys/wait.h>
#include <unistd.h>
int x;
void main(){
x= fork();
if (x!=0) {
printf("korea %d\n", x);
while (1);
}
else {
printf("china\n");
while (1);
}
}
What is the result of above code?
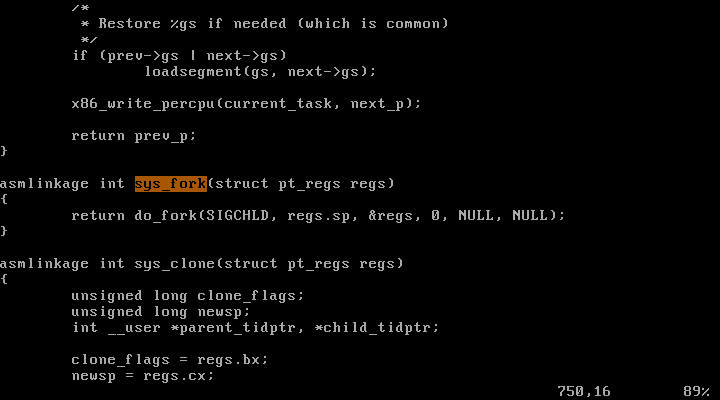
2) Algorithm of fork
fork() ==> mov $2, %eax
int $0x80
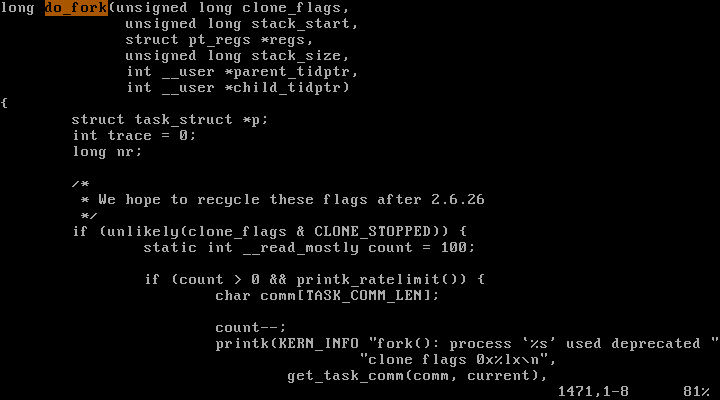
==> system_call ==> arch/x86/kernel/process_32.c/sys_fork
=> kernel/fork.c/do_fork()
fork is translated into 2 assembly instructions as below by C library:
mov $2, %eax
int $0x80
- The ISR for interrupt 0x80 is
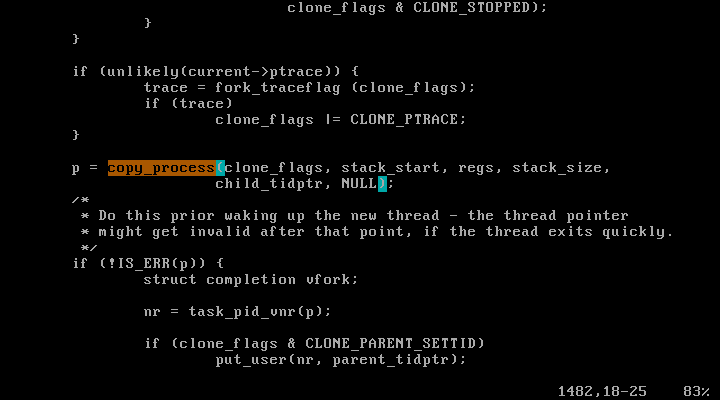
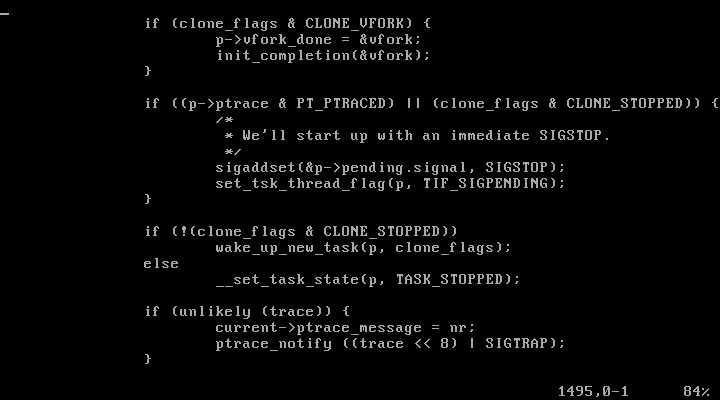
system_callwhich calls in turnsys_forkwhen eax=2.sys_forkcallsdo_forkanddo_forkdoes followings:- (1) copy the body of the parent process
- (2) copy thread_union of the parent process, and adjust some information
- (3) insert child into the process queue
- (4) return 0 to the child, and return child’s pid to the parent
3) pthread_create
pthread_create is similar to fork() except it does not copy the body of the parent.
p1.c:
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
void * foo(void * aa){
printf("hello from child\n");
return NULL;
}
void main(){
pthread_t x;
pthread_create(&x, NULL, foo, NULL); // make a child which starts at foo
printf("hello from parent\n");
}
$ gcc –o p1 p1.c –lpthread
$./p1
hello from child
hello from parent
4) kernel_thread
Use kernel_thread() in Linux kernel which is similar to pthread_create().
start_kernel() {
trap_init();
init_IRQ();
time_init();
console_init();
...............
rest_init();
}
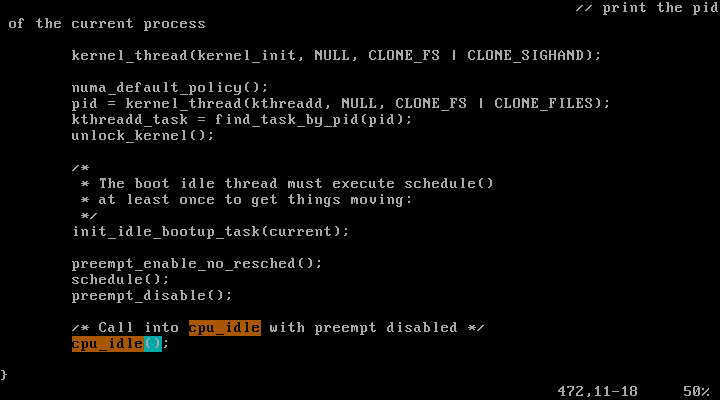
rest_init() {
.........
kernel_thread(kernel_init, ...........);
pid=kernel_thread(kthreadd, ....);
schedule();
cpu_idle();
}
The above Linux code calls kernel_thread(kernel_init, ….).
After this call the kernel is duplicated (but only the thread_union of the kernel is duplicated), and the child’s starting location is kernel_init().
Similarly, after kernel_thread(kthreadd,…), another child is born whose starting location is kthreadd.
Since we have three processes, they will be scheduled one by one.
6. exec
1) exec system call transforms one process to another
ex1.c :
void main(){
printf("I am ex1\n");
}
ex2.c :
void main(){
execve("./ex1", 0,0);
printf("I am ex2\n");
}
$ gcc ex1.c -o ex1
$ gcc ex2.c -o ex2
$ ex2
What will be the result?
2) Algorithm of exec
exec ==> mov $11, %eax ==> system_call ==> sys_execve
int $0x80
exec is translated into 2 assembly instructions as below by C library:
mov $11, %eax
int $0x80
- The ISR for interrupt 0x80 is
system_callwhich calls in turnsys_execvewhen eax=11. (sys_execveis inarch/x86/kernel/process_32.c)
sys_execvecallsdo_execve(fs/exec.c) which does following things:- (1) remove old body
- (2) load new body
- (3) update the
task_struct - (4) update the KMS (the stack portion in
thread_union) such that- KMS.eip = starting location of the new body
3) example code
exec1.c :
#include <sys/types.h>
#include <sys/wait.h>
#include <unistd.h>
int x;
void main(){
char * exec2 = "./exec2";
char * argv[2];
argv[0] = exec2;
argv[1] = 0;
x=fork();
if (x!=0){
printf("korea %d\n",x);
execve("./exec2", argv, 0);
printf("exec failed\n");
}
else{
printf("japan\n");
for(;;);
}
}
exec2.c :
#include <sys/types.h>
#include <sys/wait.h>
#include <unistd.h>
int x;
void main(){
printf("china\n");
}
$ gcc -o exec2 exec2.c
$ gcc -o exec1 exec1.c
exec1
7. shell
shell uses fork() and exec() to run the command:
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <errno.h>
int main() {
int x, y;
char buf[50];
char * argv[2];
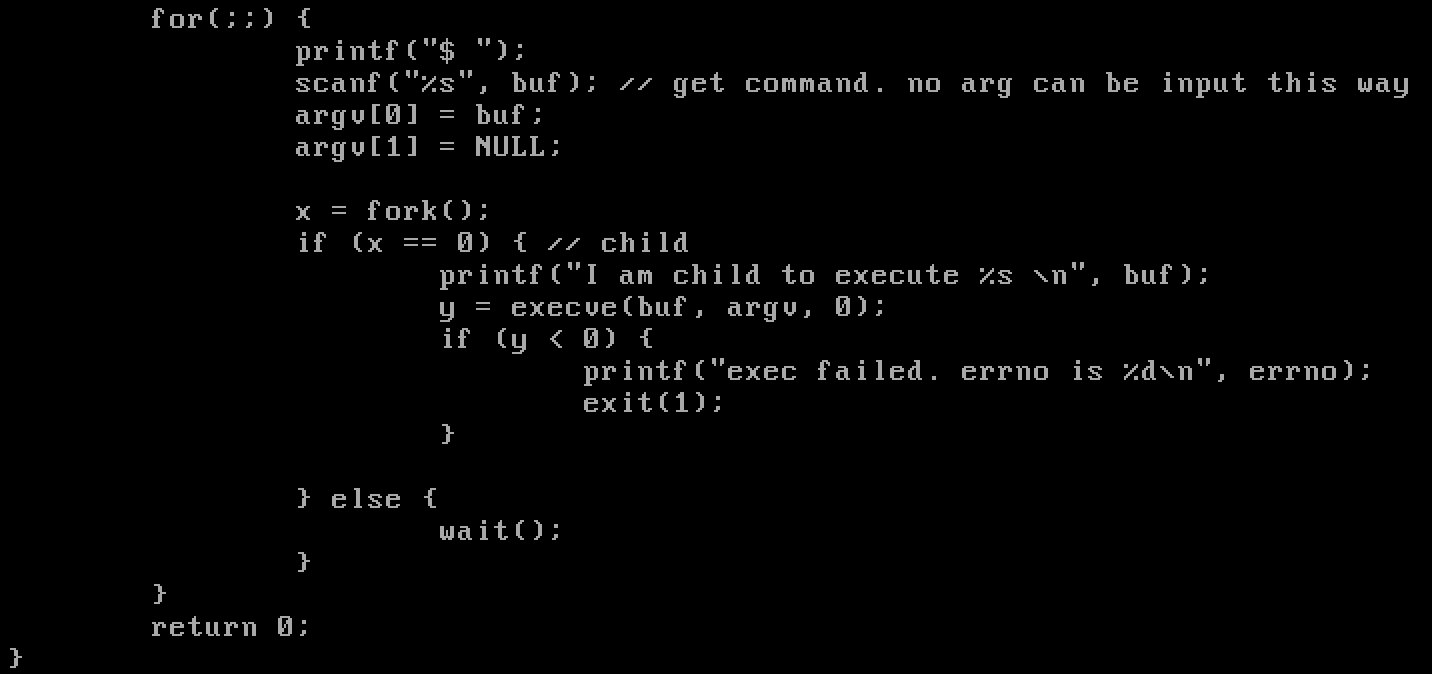
for(;;) {
printf("$ ");
scanf("%s", buf); // get command. no arg can be input this way
argv[0] = buf;
argv[1] = NULL;
x = fork();
if (x == 0) { // child
printf("I am child to execute %s\n", buf);
y = execve(buf, argv, 0);
if (y < 0) {
printf("exec failed. errno is %d\n", errno);
exit(1);
}
} else {
wait();
}
}
return 0;
}
8. Initialization process of Linux
start_kernel()
==> rest_init()
==> kernel_thread(kernel_init, ....); // now we have two processes (init_task and kernel_init)
==> kernel_thread(kthreadd, ...); // init_task runs first and create another thread.
// now we have three processes(init_task, kernel_init, kthredd)
==> schedule(); // init_task calls schedule. the scheduler picks kernel_init.
// prio of init_task is 140. prio of the other two is 120.
==> kernel_init()
==> do_basic_setup()
...........
init_post();
==> init_post()
==> run_init_process("/sbin/init", ......);
==> kernel_execve(“/sbin/init", ...); //kernel_init is transformed into /sbin/init.
==> /sbin/init
==> for (i=0;i < number of programs listed in /etc/inittab; i++) {
x=fork();
if (x==0){ // child
execve(next program listed in /etc/inittab, ...);
}
} // parent goes back to the loop to create the next child
for(;;){ // parent
waits here;
}
==> fork();
==> child init calls execve(“/sbin/agetty",..); // child init
// is transformed into /sbin/agetty
==> when user logins to this server /sbin/agetty execs to /bin/login
and display
login:
==> when user types login ID and password correctly /bin/login makes a child and
execs the child to the shell as specified in /etc/passwd, which is usually /bin/bash
root:x:0:0:root:/root:/bin/bash
...............
==> /bin/bash runs the shell code: display '#', read command, fork, let the child exec to the command, etc.
==> when user types ps -ef, shell forks and execs the child to ps -ef
init_task->/sbin/init->/sbin/agetty->/bin/login->/bin/bash->ps –ef
9. What happens when you enter a Linux command?
Shell code again
.........
for(;;){
printf("$ ");
scanf("%s", buf); // get command. no arg can be input this way
.................
x=fork();
if (x==0){ // child
y=execve(buf, argv, 0);
............
} else wait();
}
-
- Shell runs
printf("$"), and this library function callswrite(1, "$", 1)which will display prompt. (printf=>write=>INT 128=>sys_write=>display "$")
- Shell runs
-
- Shell runs
scanf("%s", buf);, and this library function callsread(0, buf, n)which will make the shell sleep until the user enters a command.
Making shell sleep means setting shell’s state to TASK_INTERRUPTIBLE (a blocked state) and taking it out of the run queue.
Since shell cannot be scheduled, the scheduler picks kernel (pid=0) as the next process and runscpu_idle(). (scanf=>read=>INT 128=>sys_read=> make shell sleep; cpu jumps tocpu_idle)
- Shell runs
-
- A user types command.
$ ls<Enter>
- A user types command.
-
- Each key typing will raise keyboard interrupt.
press l=>INT 33=>atkbd_interrupt=> storel=> cpu goes back tocpu_idle()
=> releasel=>INT 33=>atkbd_interrupt=> ignore key release => cpu goes back tocpu_idle()
=> presss=>INT 33=> ……
=> press=> `INT 33` => `atkbd_interrupt` => store `ls` in shell's buf and wakes up shell. - Waking up shell means set its state to TASK_RUNNING and put it back to the run queue. Now the scheduler picks shell as the next process and shell resumes execution.
- Each key typing will raise keyboard interrupt.
-
- shell runs
x=fork(), andfork()will make a child.
(fork=>INT 128=>do_fork()=> make a child; assume the scheduler picks parent first)
- shell runs
-
- parent shell runs
wait(), andwait()will make it sleep. Now the scheduler picks child.
(wait=>INT 128=>sys_wait)
- parent shell runs
-
- child shell runs
execve("ls", ....)which will change it to/bin/lsprogram. The scheduler picks the child again (parent is still sleeping).
(execve=>INT 128=>do_execve)
- child shell runs
-
/bin/lsruns and shows all file names in the current directory in the screen.
At the end, it callsexit().exit()will make it a zombie (set its state to TASK_ZOMBIE) and sends a signal to parent.
This signal wakes up parent (set its state to TASK_RUNNING).
The scheduler now picks parent.
-
- parent goes back to the beginning of
for(;;)loop and runsprintf("$").$
- parent goes back to the beginning of
10. Exercise-2
1) Run the program below. What happens? Explain the result.
ex1.c :
void main(){
int x;
x=fork();
printf("x:%d\n", x);
}
fork는 자신의 body와 process descriptor를 복사해 child process를 만들어낸다.
fork가 성공하면 자식 프로세스에서는 0을 반환하고(실패시 -1), 부모 프로세스에서는 자식의 pid를 반환한다.

0은 자식 프로세스의 printf로부터 출력된 값이고, 4506은 부모 프로세스의 printf로부터 출력된 것이다.
2) Try below and explain the result.
ex1.c :
void main(){
fork();
fork();
fork();
for(;;);
}
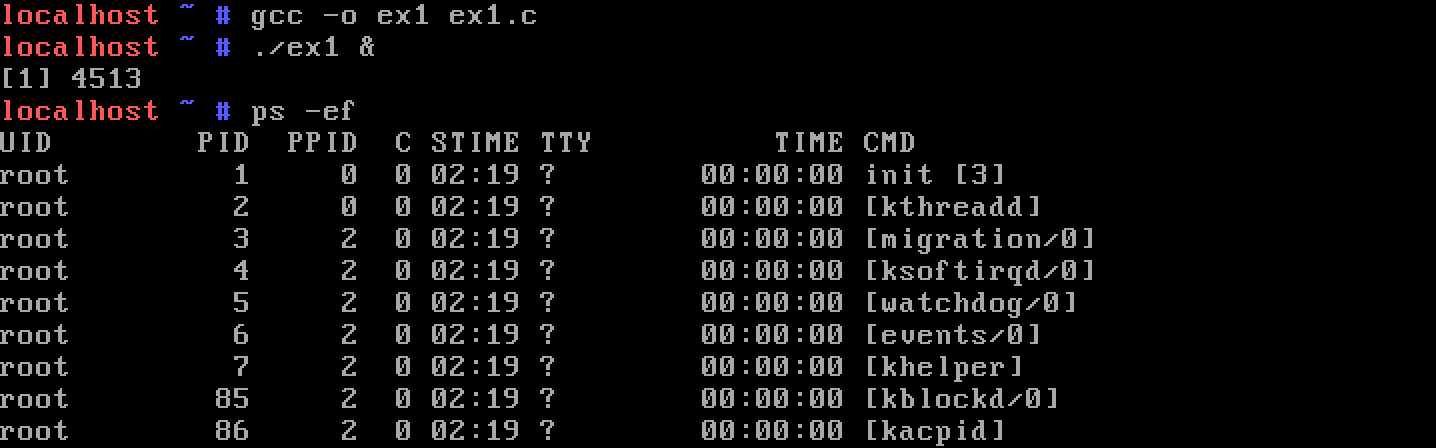
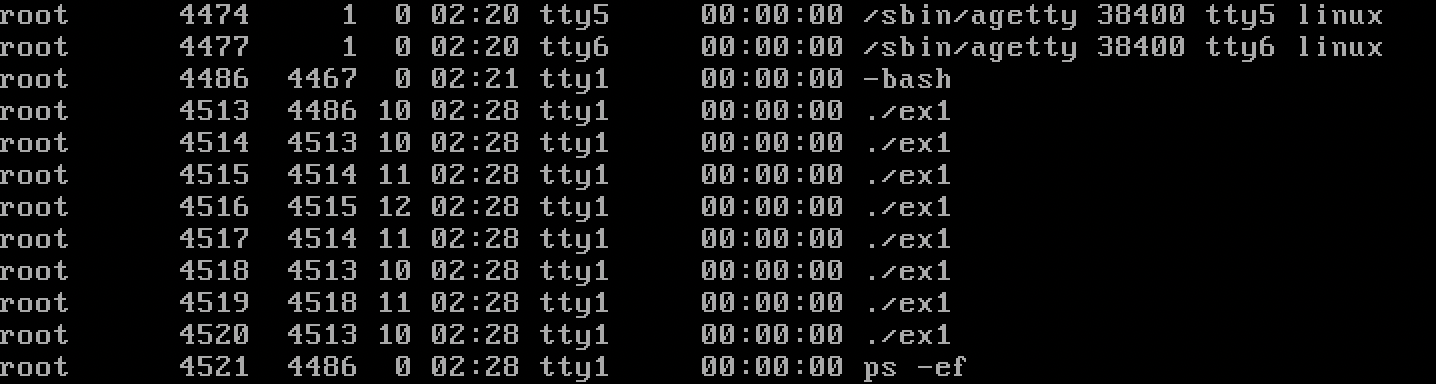
위 코드는 fork를 3번하고 무한루프를 돌고 있다.
$ gcc –o ex1 ex1.c
$ ./ex1 &
$ ps –ef
총 8개의 ./ex1 프로세스가 생성되는데, fork 함수가 3개이기 때문에 2^3=8개의 프로세스가 생성되었다.

3) Run following code. What happens? Explain the result.
ex1.c :
#include <stdio.h>
#include <unistd.h>
void main(){
int i; float y=3.14;
fork();
fork();
for(;;){
for(i=0;i<1000000000;i++) y=y*0.4;
printf("%d\n", getpid());
}
}
2번과 비슷하지만, fork()가 2번 있기 때문에 총 4(=2^2)개의 ./ex1 프로세스가 생성된다.
4개의 프로세스에서 y에 대한 연산을 수행하고 자신의 PID를 출력한다.
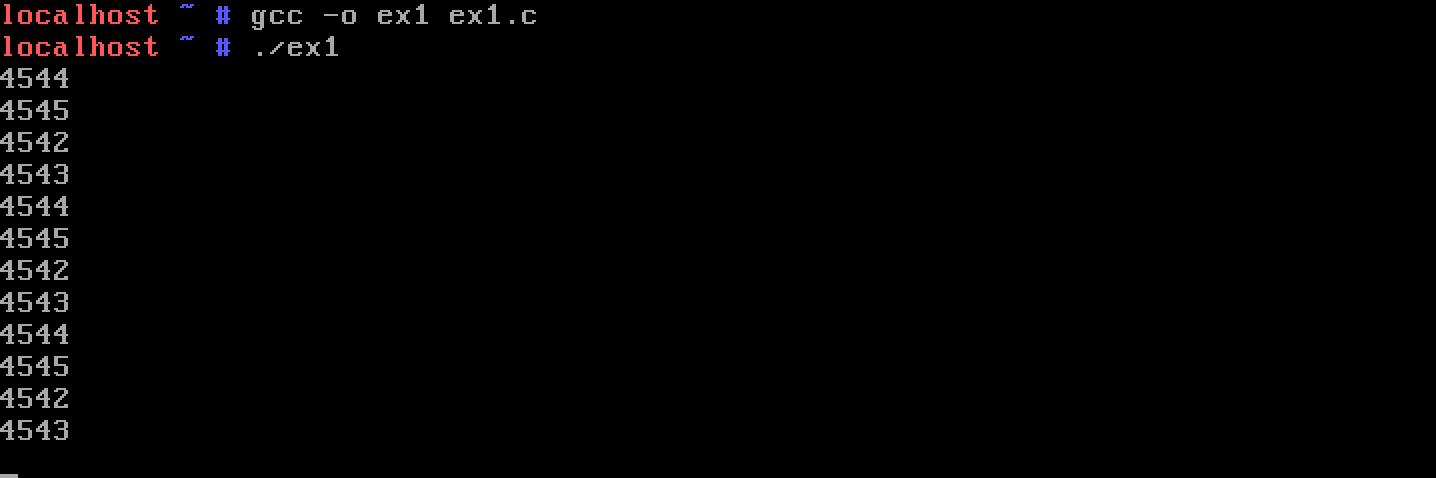
무한루프이기 때문에 프로세스가 종료될 때까지 계속 연산을 수행하고 PID를 출력할 것이다.
4) Try below and explain the result.
ex1.c :
void main(){
char *argv[10];
argv[0] = "./ex2";
argv[1] = 0;
execve(argv[0], argv, 0);
}
ex2.c :
void main(){
printf("korea\n");
}
execve는 현재 프로세스를 입력 받은 프로그램으로 프로세스를 교체해 새로 시작하는 함수이다. 첫 번째 인자로 프로그램 경로를 받고 두 번째 인자로 프로그램의 argv에 넘어갈 값을 받는다.
$ gcc –o ex1 ex1.c
$ gcc –o ex2 ex2.c
$ ./ex1

ex1에서 execve를 호출했기 때문에 현재 프로세스 body가 ex2의 body로 교체되고 새로 실행되기 때문에 ex2의 출력인 “korea”가 출력되었다.
5) Run following code and explain the result.
void main() {
char *argv[10];
argv[0] = "/bin/ls";
argv[1] = 0;
execve(argv[0], argv, 0);
}
4번과 유사하지만, 실행되는 파일 이름이 “/bin/ls”로 바뀌었다.

ls 명령어는 /bin/ls이라는 프로그램을 실행하는 명령어이다.
execve로 /bin/ls을 실행했기 때문에, ls를 실행한 결과와 같은 내용이 출력되었다.
6) Run following code and explain the result.
argv는 문자열 배열로 C언어에서 문자열과 같이 마지막 요소를 NULL 표시함으로써 배열의 끝을 나타낸다.
void main() {
char *argv[10];
argv[0] = "/bin/ls";
argv[1] = "-a";
argv[2] = 0;
execve(argv[0], argv, 0);
}
5번과 유사하지만, argv의 두 번째 요소로 “-a”가 들어왔다.
ls의 -a 옵션은 숨겨진 파일이나 디렉토리를 출력하는 옵션이다.
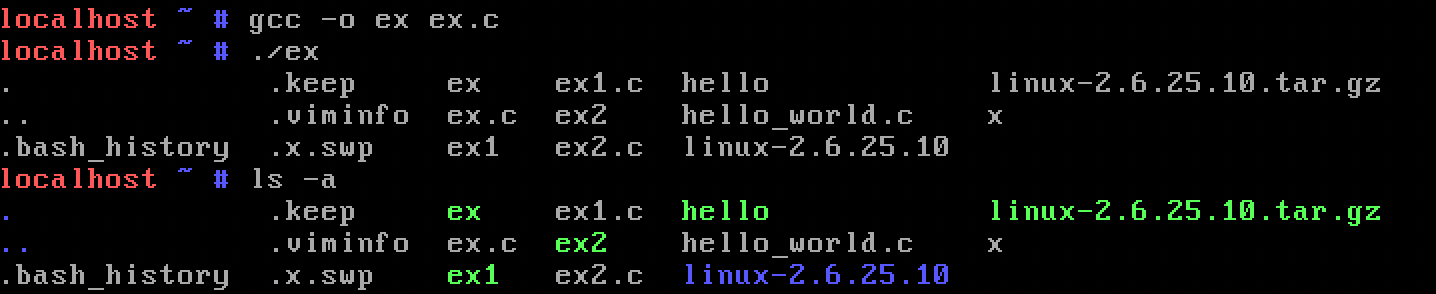
ls -a를 직접 실행해보았을 때, 동일한 출력 결과를 얻을 수 있었다.
7) Run following code and explain the result.
p1.c :
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
void * foo(void * aa) {
printf("hello from child\n");
return NULL;
}
void main() {
pthread_t x;
pthread_create(&x, NULL, foo, NULL); // make a child which starts at foo
printf("hi from parent\n");
pthread_join(x, NULL); // wait for the child
}
프로세스(process)란 단순히 실행 중인 프로그램(program)이라고 할 수 있다.
즉, 사용자가 작성한 프로그램이 운영체제에 의해 메모리 공간을 할당받아 실행 중인 것을 말한다. 이러한 프로세스는 프로그램에 사용되는 데이터와 메모리 등의 자원 그리고 스레드로 구성된다.
스레드(thread)란 프로세스(process) 내에서 실제로 작업을 수행하는 주체를 의미한다. 모든 프로세스에는 한 개 이상의 스레드가 존재하여 작업을 수행한다.
출처 : TCP School - 69) 스레드의 개념
pthread_create는 스레드를 생성하는 함수이다. 첫 번째 인자 thread는 스레드가 생성되었을 때, 이를 식별하기 위한 값이다. 세 번째 인자는 스레드가 실행될 때, 사용될 함수를 넣어준다.
$ gcc –o p1 p1.c –lpthread
$ ./p1
<pthread.h> 헤더의 함수를 사용하려면 PThread 라이브러리를 링크해야 한다. gcc에서 -l은 라이브러리를 링크하는 옵션으로 -lpthread는 /usr/lib/libpthread.so를 링크한다.
실행결과는 아래와 같다.

8) Run following code and explain the difference.
p1.c :
#include <stdio.h>
int y=0;
int main() {
int x;
x = fork();
if (x == 0) {
y = y + 2;
printf("process child:%d\n", y);
} else {
y = y + 2;
printf("process parent:%d\n", y);
}
return 0;
}
p2.c :
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
int y = 0;
void * foo(void *aa) { // aa is arguments passed by parent, if any.
y = y + 2;
printf("thread child:%d\n", y);
return NULL;
}
void main() {
pthread_t x;
pthread_create(&x, NULL, foo, NULL);
y = y + 2;
printf("thread parent:%d\n", y);
pthread_join(x, NULL); // wait for the child
}
p1.c는 process의 parent, child를 비교,
p2.c는 thread의 parent, child를 비교하는 코드이다.
p1.c와 p2.c 모두 전역 변수 y를 선언해주었다.
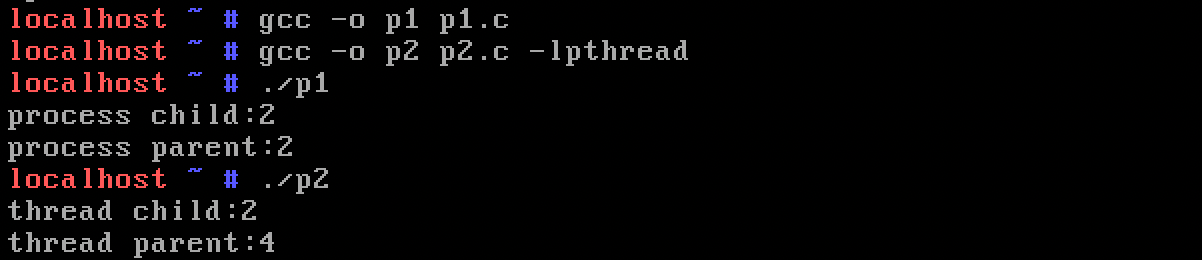
p1.c는 y의 값으로 parent와 child 모두 동일하게 2가 출력되었지만, 각각의 프로세스마다 개별적인 y를 가지고 있기 때문에 이는 서로의 영향을 받지 않은 값이다.
p2.c에서는 스레드가 한 프로세스 내의 전역변수 y를 공유하기 때문에 child process에서 2를 출력하고, parent process에서 2인 y에 2를 더한 4를 출력했다.
11. Exercise-3
1) Try the shell code in section 7. Try Linux command such as /bin/ls, /bin/date, etc.
shell.c :
Section 7의 shell code를 참고하여 shell 프로그램을 만들어보았다.
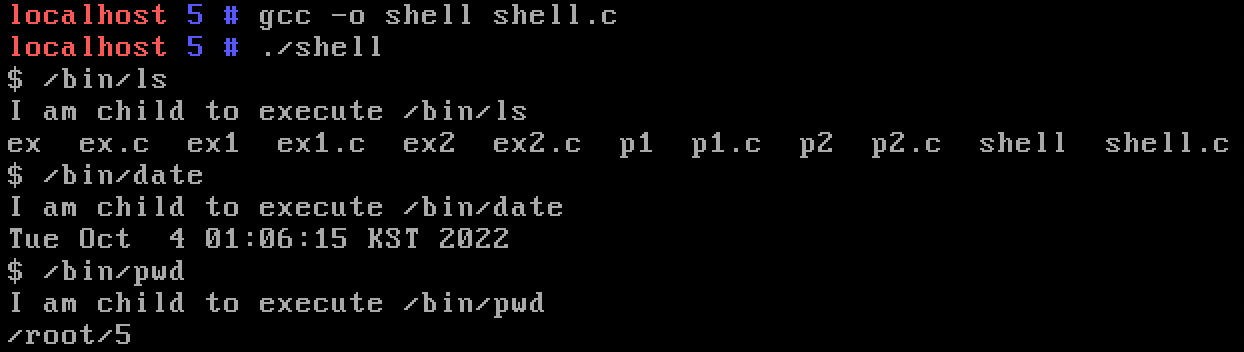
/bin/ls, /bin/date, 그리고 /bin/pwd/ 명령어를 입력해보았는데 결과값이 정확히 나온 것을 확인할 수 있었다.
2) Print the pid of the current process (current->pid) inside rest_init() and kernel_init(). The pid printed inside rest_init() will be 0, but the pid inside kernel_init() is 1. 0 is the pid of the kernel itself.
Why do we have pid=1 inside kernel_init()?
Find a location where current->pid will print 2.
init/main.c :
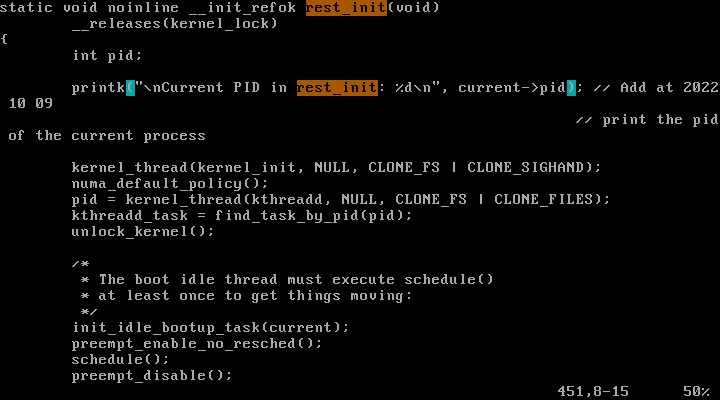
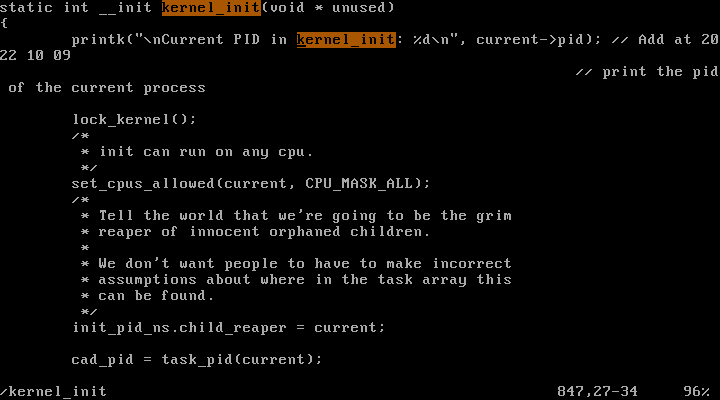
위와 같이 rest_init과 kernel_init 함수 시작 부분에 현재 PID를 출력하는 코드를 삽입했다.
변경사항을 적용하기 위해 커널을 컴파일하고, 재부팅하였다.
$ make bzImage
$ cp arch/x86/boot/bzImage /boot/bzImage
$ reboot
dmesg로 부팅 메세지를 확인해보았다.
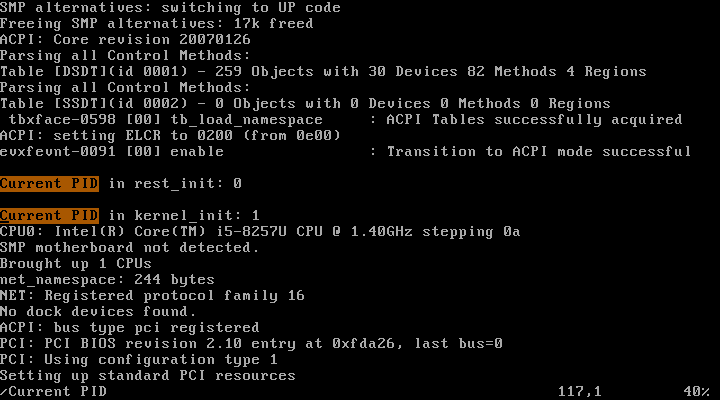
rest_init에서의 PID는 0, kernel_init에서는 1이 출력되었다.
rest_init 함수 내부에서는 kernel_thread 함수로 kernel_init이라는 task를 만들며 PID를 1로 지정한다. 이때, kernel_init은 프로세스이기 때문에 init_task와 process body를 공유한다.
다음으로 current->pid의 출력이 2가 되는 곳을 알아보기 위해 ps 명령어를 사용하였다.
$ ps -ef
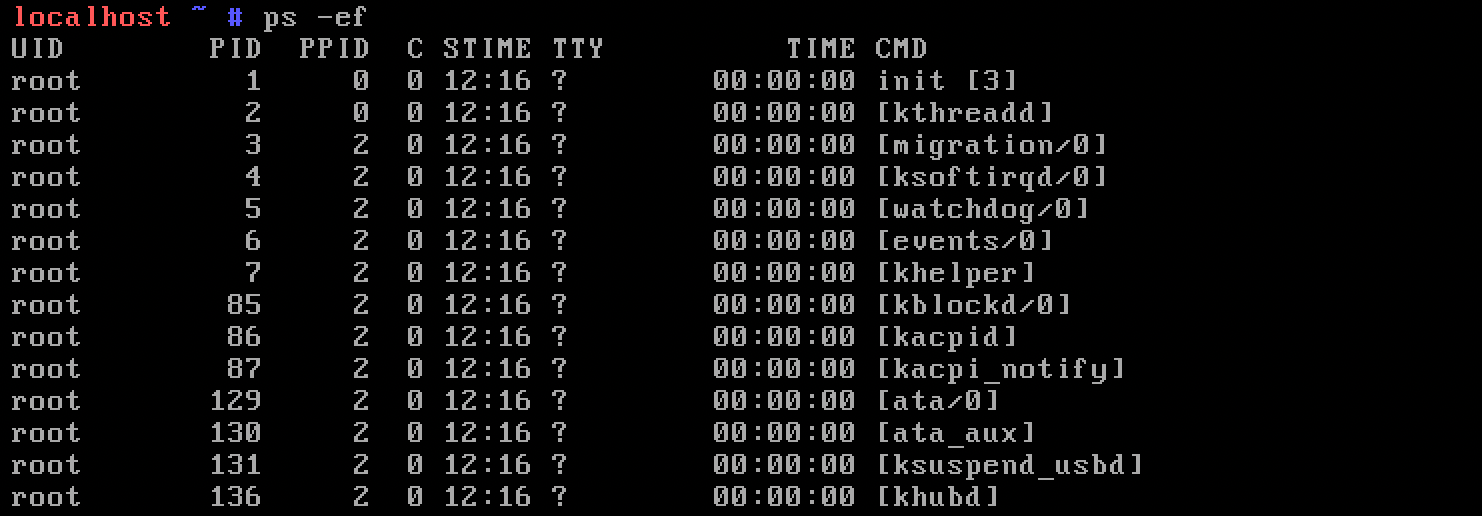
kthreadd의 PID가 2이므로 current->pid의 출력이 2가 되는 곳은 kthreadd가 실행된 이후라고 예측할 수 있다.
3) The last function call in start_kernel() is rest_init(). If you insert printk() after rest_init(), it is not displayed during the system booting. Explain the reason.
init/main.c :
void start_kernel(){
............
printk("before rest_init\n"); // this will be printed out
rest_init();
printk("after rest_init\n"); // but this will not.
}
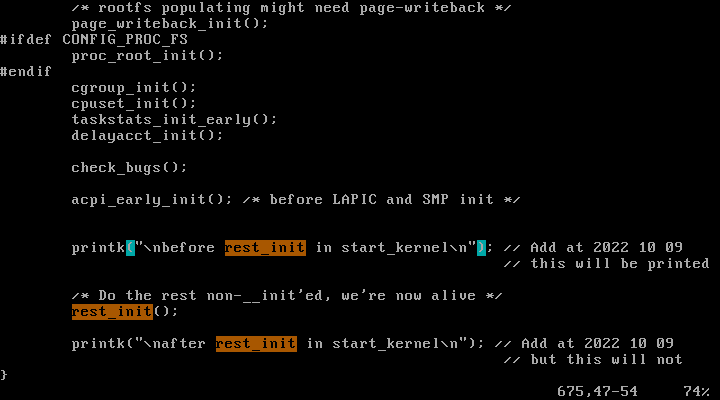
start_kernel()에서 마지막으로 호출되는 rest_init를 보면 함수의 정의 중 cpu_idle 함수를 호출한다.
arch/x86/kernel/process_64.c:
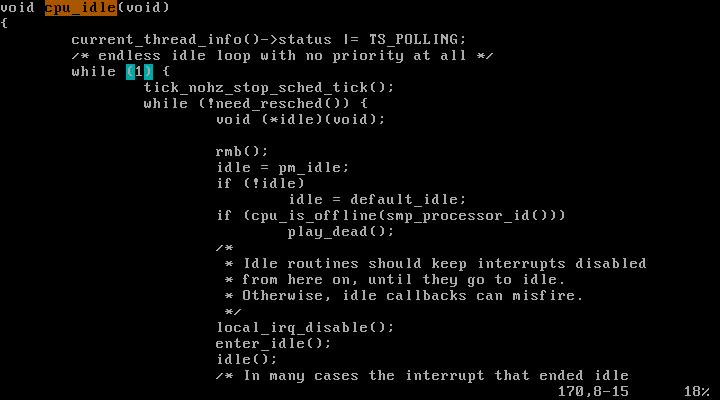
cpu_idle 함수는 “login:”를 화면에 출력한 후, 사용자의 입력 전까지 무한루프를 돌며 스케쥴링을 기다린다. 계속 무한 루프를 돌고 있기 때문에, 같은 프로세스의 rest_init 이후의 코드는 실행되지 않는다. 따라서 rest_init 이후의 코드는 부팅 과정에서 실행될 수 없다.
4) The CPU is either in some application program or in Linux kernel. You always should be able to say where is the CPU currently. Suppose we have a following program (ex1.c).
ex1.c:
void main(){
printf("korea\n");
}
When the shell runs this, CPU could be in shell program or in ex1 or in kernel.
Explain where is CPU for each major step of this program. You should indicate the CPU location whenever the cpu changes its location among these three programs.
Start the tracing from the moment when the shell prints a prompt until it prints next prompt.
shell: printf(“$”); // CPU는 shell에 있으며, shell에서 입력 가능을 나타내는 문자를 출력
=> write(1, “$”, 1); // CPU는 C 라이브러리에 있으며, STDOUT_FILENO(=1)에 “$”을 1글자 출력
=> INT 128 // CPU는 C 라이브러리에 있으며, 시스템 콜 인터럽트인 128번을 호출
=> mov eax 4 // CPU는 C 라이브러리에 있으며, write의 시스템 콜 번호는 4
kernel: sys_write() // CPU는 kernel에 있으며, “$” 문자열을 출력하기 위한 시스템 콜 호출
shell: scanf(“%s”, buf); // CPU는 shell에 있으며, 사용자가 입력한 문자열을 읽음
=> read(1, buf, n); // CPU는 C 라이브러리에 있으며, STDIN_FILENO(=1)에서 len 만큼 읽어 buf에 저장
=> INT 128 // CPU는 C 라이브러리에 있으며, 시스템 콜 인터럽트인 128번을 호출
=> mov eax 3 // CPU는 C 라이브러리에 있으며, read의 시스템 콜 번호는 3
kernel: sys_read(); // CPU는 kernel에 있으며, 입력한 문자열을 읽어오는 시스템 콜 호출
/* (키보드 입력 발생) */
shell: INT 33 // CPU는 C 라이브러리에 있으며, 키보드 인터럽트인 33번 호출
kernel: atkbd_interrupt // CPU는 C 라이브러리에 있으며, 키보드 버퍼에 입력한 문자 저장
/* (ENTER가 입력될 때까지 위 과정 반복) */
/* (ENTER 입력) */ // CPU가 shell로 되돌아감
shell: x=fork(); // CPU는 shell에 있으며, 프로그램을 실행하기 위한 자식 프로세스 생성
=> INT 128 // CPU는 C 라이브러리에 있으며, 시스템 콜 인터럽트인 128번을 호출
kernel: sys_fork() // CPU는 kernel에 있으며, fork의 시스템 콜 호출
shell: printf(“I am child~%s\n”, buf); // CPU는 shell에 있음
=> write(1, “I am~”, n) // CPU는 C 라이브러리에 있으며, STDOUT_FILENO(=1)에 “I am~”을 n글자만큼 출력
=> INT 128 // CPU는 C 라이브러리에 있으며, 시스템 콜 인터럽트인 128번을 호출
kernel: sys_write() // CPU는 kernel에 있으며, “I am~”문자열을 출력하기 위한 시스템 콜 호출
shell: y=execve(buf, argv, 0); // CPU는 shell에 있으며, 입력받은 프로그램을 실행
=> INT 128 // CPU는 C 라이브러리에 있으며, 시스템 콜 인터럽트인 128번을 호출
kernel: sys_execve() // CPU는 kernel에 있으며, execve의 시스템 콜 호출
ex1: printf(“korea\n”); // CPU는 ex1에 있음
=> write(1, “korea\n”, 6); // CPU는 C 라이브러리에 있으며,
=> INT 128 // CPU는 C 라이브러리에 있으며, 시스템 콜 인터럽트인 128번을 호출
kernel: sys_write() // CPU는 kernel에 있으며, “korea”문자열을 출력하기 위한 시스템 콜 호출
=> exit(0)
shell: else wait(); // CPU는 shell에 있음
=> INT 128 // CPU는 C 라이브러리에 있으며, 시스템 콜 인터럽트인 128번을 호출
kernel: sys_wait4 // CPU는 kernel에 있음
shell: printf("$"); // CPU는 다시 shell에 있으며, 프로그램이 종료되면 다시 shell에서 입력 가능을 나타내는 문자를 출력
5) What happens if the kernel calls kernel_init directly instead of calling kernel_thread(kernel_init, ...) in rest_init()?
Call kernel_init with NULL argument and explain why the kenel falls into panic.
init/main.c :

rest_init 함수의 정의에서 kernel_thread 코드를 주석 처리한 후 kernel_init(NULL);로 직접 호출하도록 하였다.
이후 recompile 및 재부팅하였다.
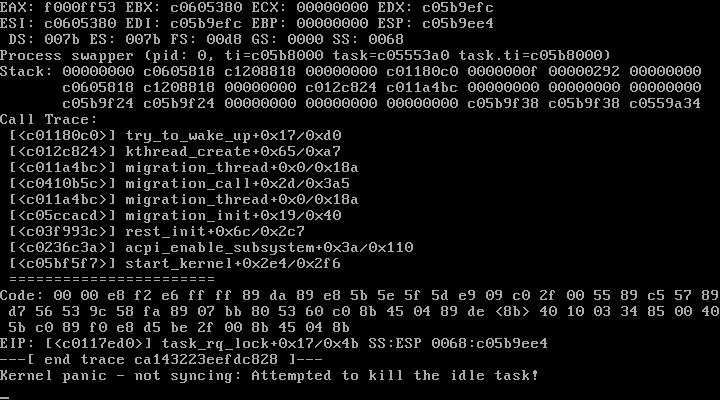
마지막 줄에 “Kernel panic”이라는 에러 메세지가 출력된 후 부팅이 더 이상 진행되지 않았다.
kernel_thread는 프로세스 디스크립터를 복사하는데, kernel_thread 없이 kernel_init을 실행하게 되면 kernel_init 내부의 무한루프로 인해 이후 프로세스가 실행되지 않는다.
또한, kernel_execve으로 다른 프로세스를 실행하면 현재 body를 제거했기 때문에 오류가 발생했다.
6) Trace fork, exec, exit, wait system call to find the corresponding code for the major steps of each system call.
fork
fork는 sys_fork 함수를 호출한다.
arch/x86/kernel/process_32.c :
kernel/fork.c :
do_fork :
copy_process :
……
dup_task_struct :
…..
sys_fork -> do_fork -> copy_process -> dup_task_struct
do_fork에서 return하는 nr은 복사된 프로세스의 PID이다.
exec
exec는 sys_exec 함수를 호출한다.
arch/x86/kernel/process_32.c :
fs/exec.c :
……

sys_execve -> do_execve -> open_exec -> sched_exec
do_execve에서 파일을 열고, 스케줄에 등록하고, argv등의 값을 넘겨준다.
exit
exit는 sys_exit 함수를 호출한다.
kernel/exit.c :
sys_exit :

do_exit :
……
……
……
sys_exit -> do_exit -> exit_signals -> exit_mm -> exit_thread -> exit_notify -> schedule
시그널 보내고(등록된 함수 호출), 메모리 회수하고, 스레드 종료하고, 부모 프로세스에 알리고(시그널 전송), 스케줄링으로 완전히 제거한다.
wait
wait(&wstatus)는 waitpid(-1, &wstatus, 0)이다. 따라서 waitpid를 찾아야 한다.
waitpid는 sys_waitpid 함수를 호출한다.
kernel/exit.c :
sys_waitpid :
sys_waitpid를 찾아가면,
sys_waitpid는 호환성을 위해 남겨두었을뿐, sys_wait4으로 구현된다고 주석이 남겨있다.
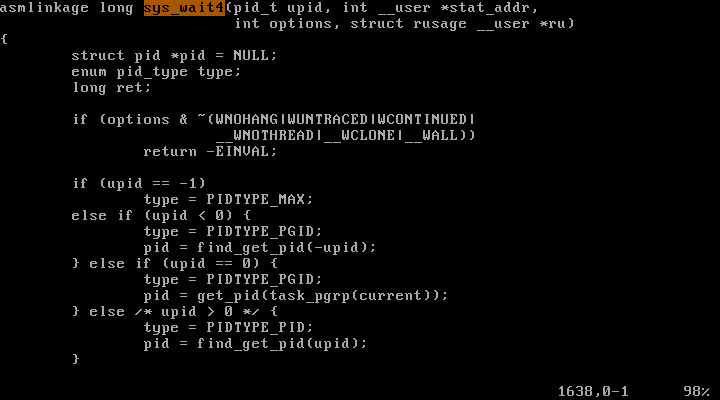
sys_wait4를 찾아보자.
sys_wait4 :

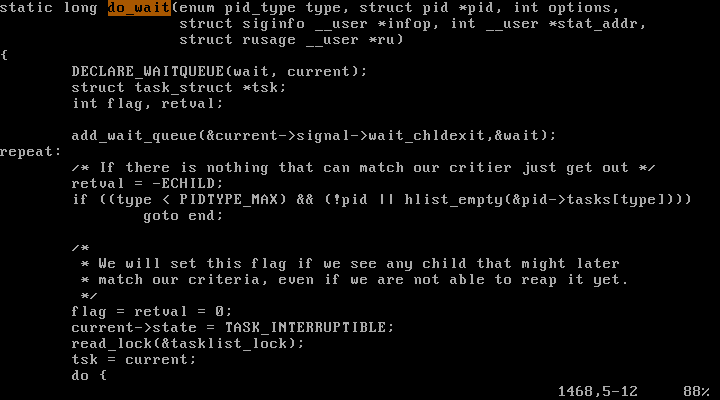
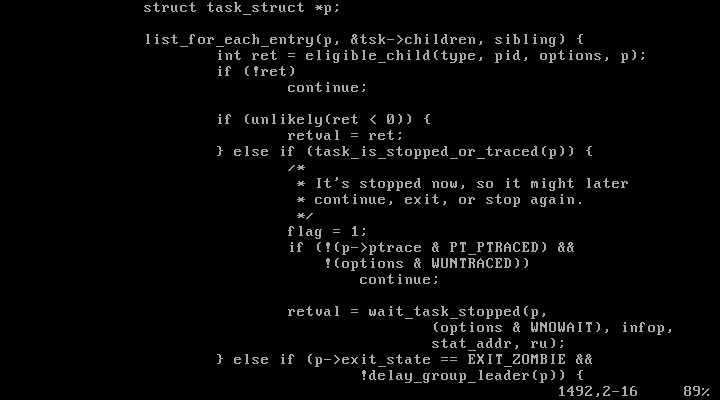
do_wait :
……
sys_waitpid -> sys_wait4 -> do_wait -> wait_task_stopped / wait_task_zombie / wait_task_continued
7) Explain the result of following:
$ ./startsys;./sysnum;./stopsys
where, startsys sets the kernel flag so that system call number can be displayed, stopsys resets it, and sysnum calls printf.
sysnum.c :
void main(){
printf("hi\n");
}
startsys.c :
void main(){
syscall(31); // start printing sysnum
}
stopsys.c :
void main(){
syscall(32); // stop printing sysnum
}
8) When the shell runs
execve(argv[0], argv, 0);
how the Linux knows the value of argv?
9) Write a program that causes divide-by-zero fault:
int x,y;
y=0;
x=20/y;
This program, when run, will print:
Floating point exception
and dies. It dies because of divide-by-zero exception. Modify the kernel such that the system prints instead (when this program runs):
Divide-by-zero exception
Floating point exception
Tip) to make a call to a new function from entry.S, you need to protect registers as follows:
SAVE_ALL
call new_function
RESTORE_REGS
11. exit
All programs end with exit() system call. Even If the programmer didn’t put exit() in his code, the compiler will provide it in crtso (C run-time start-off function).
1) algorithm
- remove body
- make it a zombie
- send SIGCHLD to the parent
- adopt children to init process
- schedule next process
2) kernel code
exit -> sys_exit ->
kernel/exit.c:
do_exit() {
struct task_struct *tsk = current;
exit_mm(tsk); // remove body
exit_sem(tsk);
__exit_files(tsk);
__exit_fs(tsk); // remove resouces
exit_notify(tsk); // send SIGCHLD to the parent, ask init to adopt my own child,
// set tsk->exit_state = EXIT_ZOMBIE to make it a zombie
tsk->state = TASK_DEAD;
schedule(); // call a scheduler
}
12. wait
The parent should wait in wait to collect the child; otherwise the child stays as a zombie consuming 8192 bytes of the memory.
1) algorithm
if child has exit first (that is, if the child is a zombie)
let it die completely (remove its process descriptor)
else (child is not dead yet)
block parent
remove parent from the run queue
schedule next process
When later the child exits, the parent will get SIGCHLD, wakes up, and be inserted into the run queue.
2) kernel code
wait -> sys_wait4 ->
kernel/exit.c :
do_wait() {
struct task_struct *tsk;
DECLARE_WAITQUEUE(wait, current); // make a "wait" queue
add_wait_queue(¤t->signal->wait_chldexit, &wait);
current->state = TASK_INTERRUPTIBLE; // block parent
tsk = current;
do{
list_for_each(_p, &task-children){
p = list_entry(...);
if (p->exit_state == EXIT_ZOMBIE){ // if child has exit first
wait_task_zombie(p, ...); // kill it good
break;
}
// otherwise, it's still alive. wait here until it is dead
wait_task_contiuned(p,...);
break;
}
schedule();
}